


























10-7
176183-1CD
HW1483638
10 Cable Wiring
10.2 Connecting Cables
MH5S
(II)
/MH5F
9. Tighten the hexagon socket head cap screws with a tightening
torque shown in
Table 10-2 “Checklist for Cable Wiring Parts in Casing
.
10. Mount the cover on the casing with the hexagon socket button head
screws
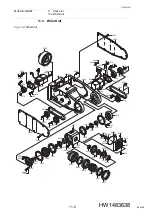
10.2.3 Wrist Unit
• Refer to
Table 10-1 “Checklist for Cable Wiring Parts in Wrist Unit”
and
Fig. 10-1 “Cable Wiring in Wrist Unit”
1. Insert the cable in the wrist unit and fix the white-marked part of the
internal wiring harness with the cable tie .
2. Mount two air hoses and the internal user I/O wiring harness
connectors. Refer to
section 10.1.2 “Casing and L-Arm”
and mount the
air hoses, “A-black” and “B-blue”. Mounting them on the wrong places
makes the air lines interchanged in the manipulator and causes the
malfunction of the devices as the hand incorporated to the
manipulator.
Also, make sure that the air hoses are inserted completely and not
removed.
Connect the internal user I/O wiring harness connectors to the
connectors “3BC” and “4BC”.
3. Connect the connectors of the B- and T-axes motors to the internal
wiring harness and remove the backup batteries.
4. After accommodate the internal wiring harness in the wrist unit, mount
the cover on the wrist unit with the hexagon socket button head
screws .
3
1
2
3
1
2
87 of 99


































































