























5 Principle of Time of Flight
5.1
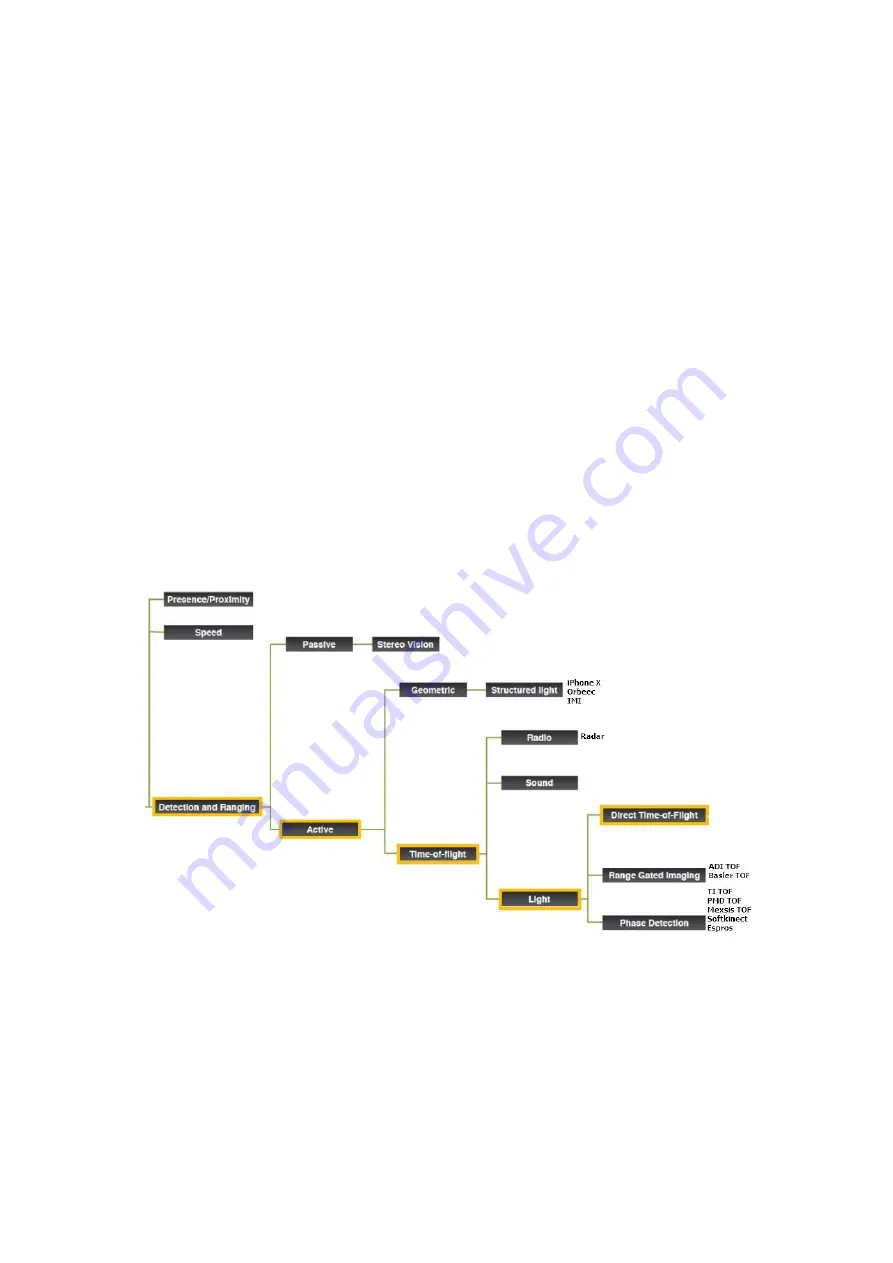
Scope of remote sensing technology
·
Presence or proximity detection
, where the absence or presence of an object in a
general area is the only information that is required (e.g., for security applications).
This is the simplest form of remote sensing;
·
Speed measurement
, where the exact position of an object does not need to be
known but where its accurate speed is required (e.g., for law enforcement applications);
·
Detection and ranging
, where the position of an object relative to the sensor needs
to be precisely and accurately determined.
This document will concentrate on technologies capable of providing a detection and
ranging functionality, as it is the most complex of the three applications. From the
position information, presence and speed can be retrieved so technologies capable of
detection and ranging can be universally applied to all remote sensing applications.
5.1.1 Direct Time of Flight
In the direct time-of-flight measurement method, a discrete pulse is emitted and one
or several timers are used to measure the time difference between the emitted pulse
and the return echo, based on threshold detection. This time difference can be directly
converted to a distance, based on the following equation:







































































