





























3.3. Robot Control
Screen layout
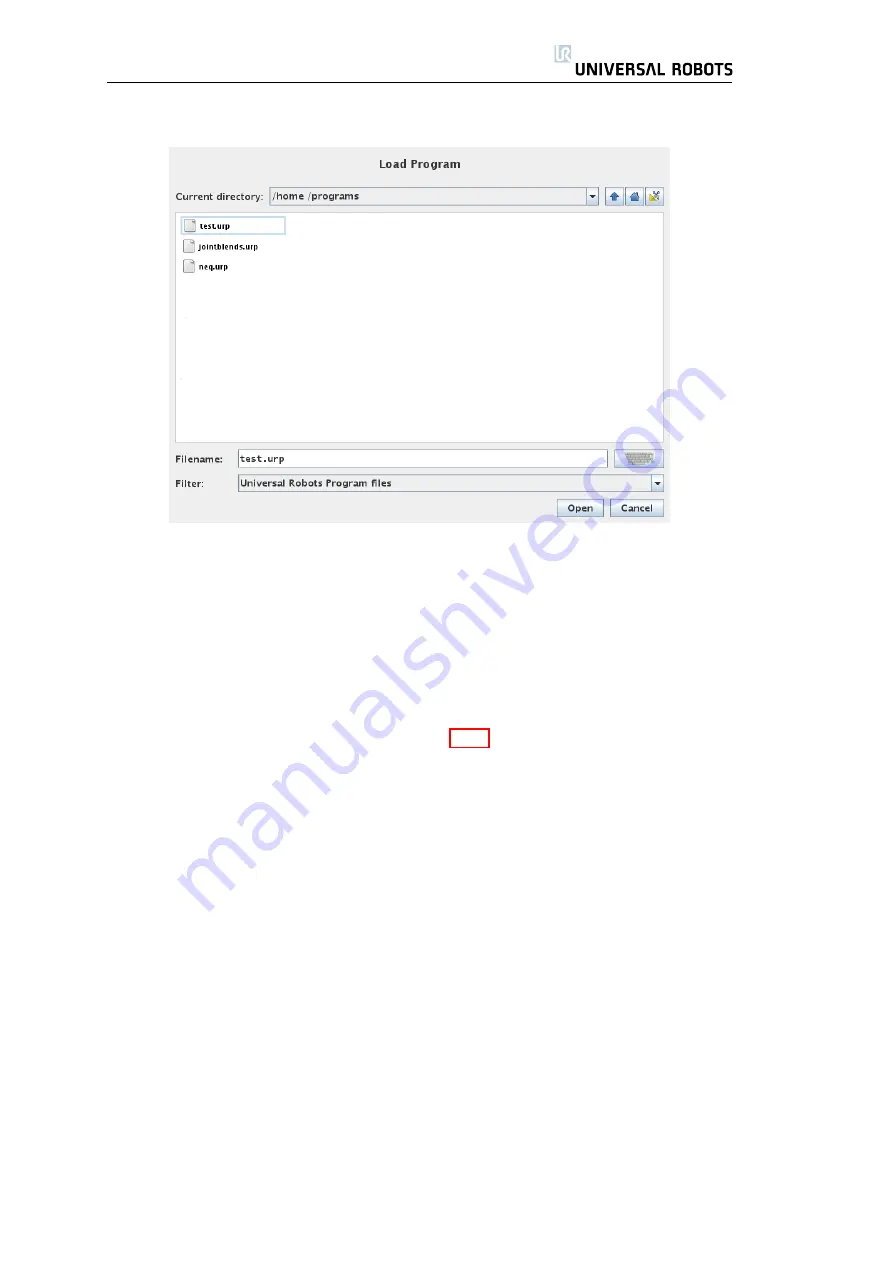
This image shows the actual load screen. It consists of the following important
areas and buttons.
Path history
The path history shows a list of the paths leading up to the present
location. This means that all parent directories up to the root of the computer
are shown. Here you must notice that you may not be able to access all the
directories above the programs folder.
By selecting a folder name in the list, the load dialog changes to that direc-
tory and displays it in the file selection area 3.3.7.
File selection area
In this area of the dialog the contents of the actual area is
present. It gives the user the option to select a file by single clicking on its name
or to open the file by double clicking on its name.
In the case that the user double-clicks on a directory, the dialog descends
into this folder and presents its contents.
File filter
By using the file filter, one can limit the files shown to include the type
of files that one wishes. By selecting “Backup Files” the file selection area will
display the latest 10 saved versions of each program, where
.old0
is the newest
and
.old9
is the oldest.
File field
Here the currently selected file is shown. The user has the option to
manually enter the file name of a file by clicking on the keyboard icon to the
right of the field. This will cause an on-screen keyboard to pop up where the
user can enter the file name directly on the screen.
Open button
Clicking on the Open button, will open the currently selected file
and return to the previous screen.
45
UR-6-85-5-A
Содержание UR-6-85-5-A
Страница 1: ...UR 6 85 5 A User Manual Version 1 11 January 2010...
Страница 2: ...2 UR 6 85 5 A...
Страница 6: ...Contents 6 UR 6 85 5 A...
Страница 16: ...1 4 Mounting Instructions 16 UR 6 85 5 A...
Страница 33: ...Chapter 3 PolyScope Software 33...
Страница 77: ...Appendix A Safety Assessment 77...





















































