




























1. When you use the following network setting methods, please use
xarm-tool-gui tool to update UFACTORY Studio and firmware online.
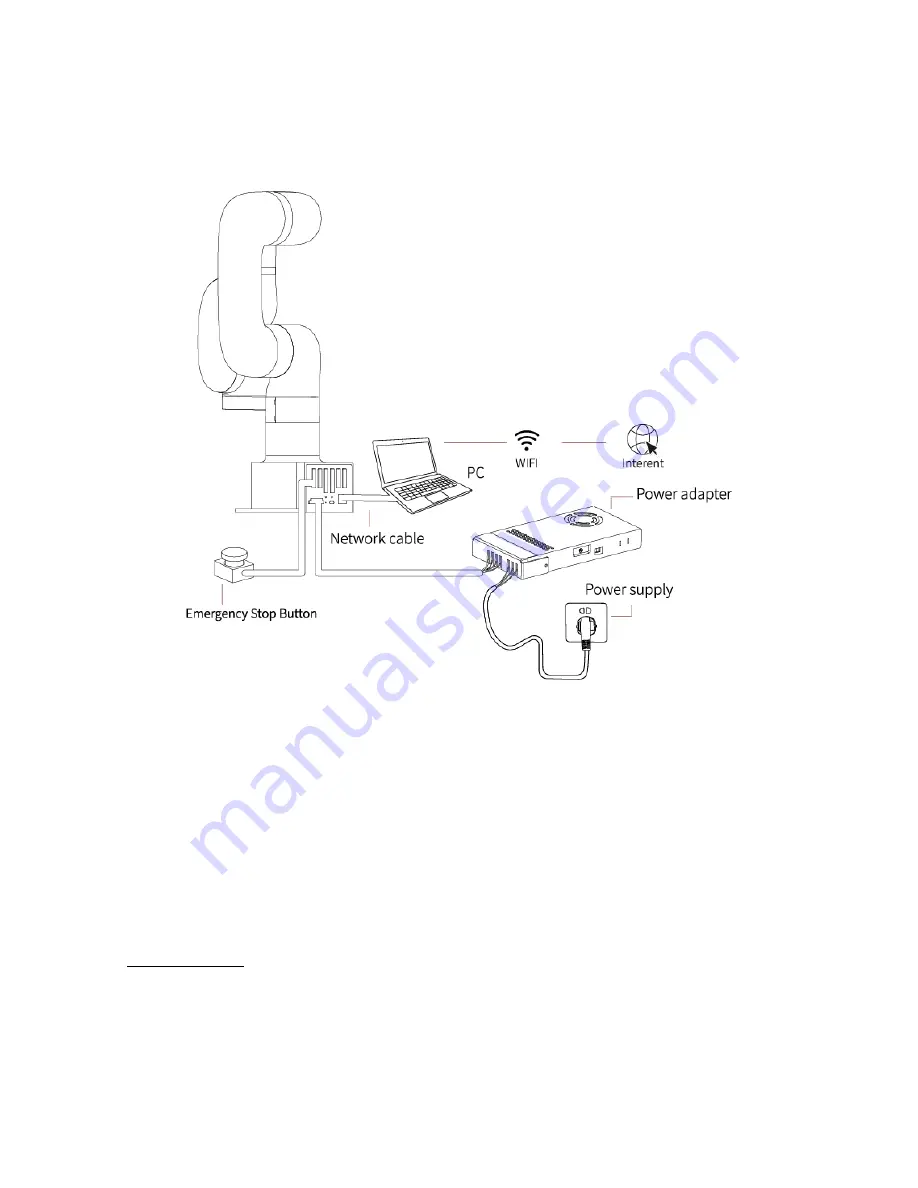
The control box is directly connected to the PC(The PC is connected to the Internet)
●
The method for the online update using the xarm-tool-gui tool is as
follows:
1) Tool download
Download address of xarm-tool-gui tool, UFACTORY Studio and xArm Firmware
installation package:
Since your PC connected to the robot can access the Internet, you can
directly download the above installation package to your PC.
2) After decompressing the installation package, run the xarm-tool-gui
program that matches your PC's operating system, select the type of







































































