














Page 14
Additional Safety Features
1. Take-Off/Manual Flight Mode
a. With Switch SWB in its ‘0’ position & Switch SWA in its ‘0’ position, the Quattro-X is in its Take-Off
(or Manual) Flight Mode. In this mode, the Quattro-X is controlled without any GPS stability.
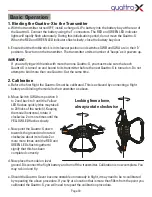
b. Ensure the throttle is in its low position and both SWB and SWA are in their ‘0’ positions. Insert a
charged battery, plug it in and allow the Quattro-X to initialise. Close the battery hatch and switch
on the transmitter. The motors can now be unlocked. When the RED LED stops flashing and
remains steady, the model is ready for flight.
c. In Take-Off/Manual Flight Mode, the Quattro-X can be flown forwards and backwards, bank left
and right and rotate (yaw) to the left and right. It can ascend and descent using the throttle stick.
2. GPS Mode
a. Only enter GPS Mode once the Quattro-X is airborne in Take-Off/Manual Flight Mode. Do not
enable GPS Mode until the Quattro-X is in flight.
b. Once the Quattro is hovering at the desired height, enter GPS Mode by keeping SWB in its
‘0’position and selecting position ‘1’ on Switch SWA. When the Quattro-X is in a stable hover,
push the throttle stick to its mid-position. The transmitter will give a beep, beep, beep... sound to
confirm the throttle stick is centred. The model will now remain in this position without control
inputs from the pilot. Allow sufficient space to fly in GPS Mode as the model’s position can still be
affected by the wind and other weather conditions. I
MPORTANT:
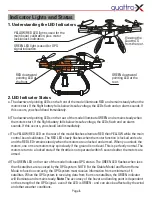
In GPS Mode, the GPS signal
indicator LED (the GREEN LED on the rear of the Quattro-X) must remain illuminated with a steady
light. If the LED begins to flash, the GPS signal has been lost and you should return to
Take-Off/Manual Mode by moving switch SWA to its ‘0’ position.
c. When in GPS Mode, the Quattro-X is much more stable and it will try to stay in the same position.
You should move the throttle stick to its mid-position (a beep-beep-beep... sound will identify this)
to maintain both height and position.
Note:
Even if you have a solid GREEN LED, the accuracy of the
hover point is dependent on the strength of the GPS signal and can be affected by the wind and
other weather conditions.
3. Orientation Mode
a. Only enter Orientation Mode once the Quattro-X is airborne in Take-Off/Manual Mode. One of the
most tricky aspects of flying a Quadcopter is orientation - being able to see which way round the
model is facing (which is the front and the back of the model) when in flight.
b. With Orientation Mode selected, the orientation of the model is not important - pushing forward on
the elevator stick will make the Quattro-X move forward, relative to the direction the front of the
Quattro-X is pointing when Orientation Mode is selected. Forward is now forward, no matter which
way the model is pointing. Additionally, moving the aileron stick to the left will make the model bank
left in relation to the position where the Orientation Mode was selected & not in relation to the model.
c. Ensure that the model is pointing away from you when selecting Orientation Mode. Move the SWB
Switch to position ‘1’ then move SWA Switch to position ‘1’ to select Orientation Mode. Now a
forward stick command will always result in the Quattro-X moving in the direction the front of the
model was pointing when Orientation Mode was selected.
IMPORTANT:
Ensure the Quattro-X is
pointing away from you when selecting Orientation Mode as it uses this point for reference.
4. Altitude Hold Mode
a. Only enter Altitude Hold Mode once the Quattro-X is airborne in Take-Off/Manual Flight Mode.
Altitude Hold Mode maintains the same altitude. To enter this mode, take off and hover at the
desired height using Take-Off/Manual Mode. Select Altitude Hold Mode by flicking Switch SWB to
its ‘1’ position and Switch SWA to its ‘2’ position. Now move the throttle to its mid-position. The
transmitter will indicate the throttle stick is in this position by emitting a beep-beep-beep... sound.
b. When in Altitude Hold Mode, the Quattro-X will fly at the same height. Allow sufficient space to fly
in this mode as the model’s position can still be affected by the wind and other weather conditions.
5. Return Home Mode
a. Only enter the Return Home Mode when the Quattro-X is in the hover, not in forward flight. To
Return Home, flick the SWB switch to its ‘0’ position and the SWA switch to its ‘2’ position. If the
model’s altitude is greater than 15 metres, it will return to its starting point immediately. If it is less
than 15 metres, it will climb first, then return to its starting point. The Home position is the point from
which the Quattro-X took off. The accuracy of the landing depends on the GPS signal strength.
b. Before entering Return Home mode, ensure you have a GPS signal and you have a solid GREEN LED
on the back of the model. If the LED is flashing, it means that you have lost the GPS signal and you
must not attempt to enter the Return Home mode until you have acquired a strong GPS signal.
Note:
To cancel the Return Home function, simply move SWA to its ‘1’ or ‘0’ positions.
Until you are familiar with the switch layout on the transmitter and you can select the
various flight modes at will and without delay, it makes sense to have a friend act as a
co-pilot or wingman to call out the required switch positions should you need them in a
hurry.
Please cut-off the instruction sheet overleaf and keep it in your transmitter case or flight
box so it is always available when you are flying.
Co-Pilot’s Briefing Sheet
1. Flight Battery: Low Power - Alarm
a. When the flight battery falls below a pre-set voltage, there is an audible alarm to warn you of this
and you must land immediately. The Red and Green LEDs under the Quattro-X also flash to
indicate that the power is low in the flight battery and you should land.
2. Flight Battery: Very Low Power - Auto Land
a. When the flight battery voltage falls below a critical level, the Quattro-X enters an automatic Safe
Land sequence. If you do not act on the Low Power warnings above, the Quattro-X will attempt to
land safely while sufficient power remains in the Flight Battery. As there may not be enough
power to return the Quattro-X to home, it will simply attempt to land safely where it is. As this is
carried out as an emergency procedure, the landing will not be as smooth as the Return Home
landing sequence. Once the landing has been completed, you should lock the motors moving the
left-hand joystick to the bottom left of transmitter and holding it there until the RED LED flashes.
c. Once the Quattro-X has returned to home using the Return Home mode, the model will
automatically lock the motors for safety. If the ground is not level, one or more motors may continue
to run slowly before locking. Before flying again, return switch SWB and switch SWA to their ‘0’
positions and unlock the motors using the procedure identified in Step 4 Basic Operation.
d. In extreme cases, if the transmitter is switched off, the Quattro-X will automatically enter the Return
Home mode and will land by itself if it has a strong GPS signal. When the Quattro-X is in this
automatic Return Home mode, do not attempt to interrupt it by turning the transmitter back on to
regain control until after the model has landed.
Note:
The accuracy of the landing point is dependent on the strength of the GPS signal and can be
affected by the wind and other weather conditions.
Содержание Quattro-x
Страница 1: ...HIGH PERFORMANCE QUAD INSTRUCTION MANUAL...





















































