





























EtherCAT Information
TR-Electronic GmbH 2010, All Rights Reserved
Printed in the Federal Republic of Germany
Page 102 of 176
TR - ECE - BA - DGB - 0080 - 05
10/07/2013
4.2 Protocol
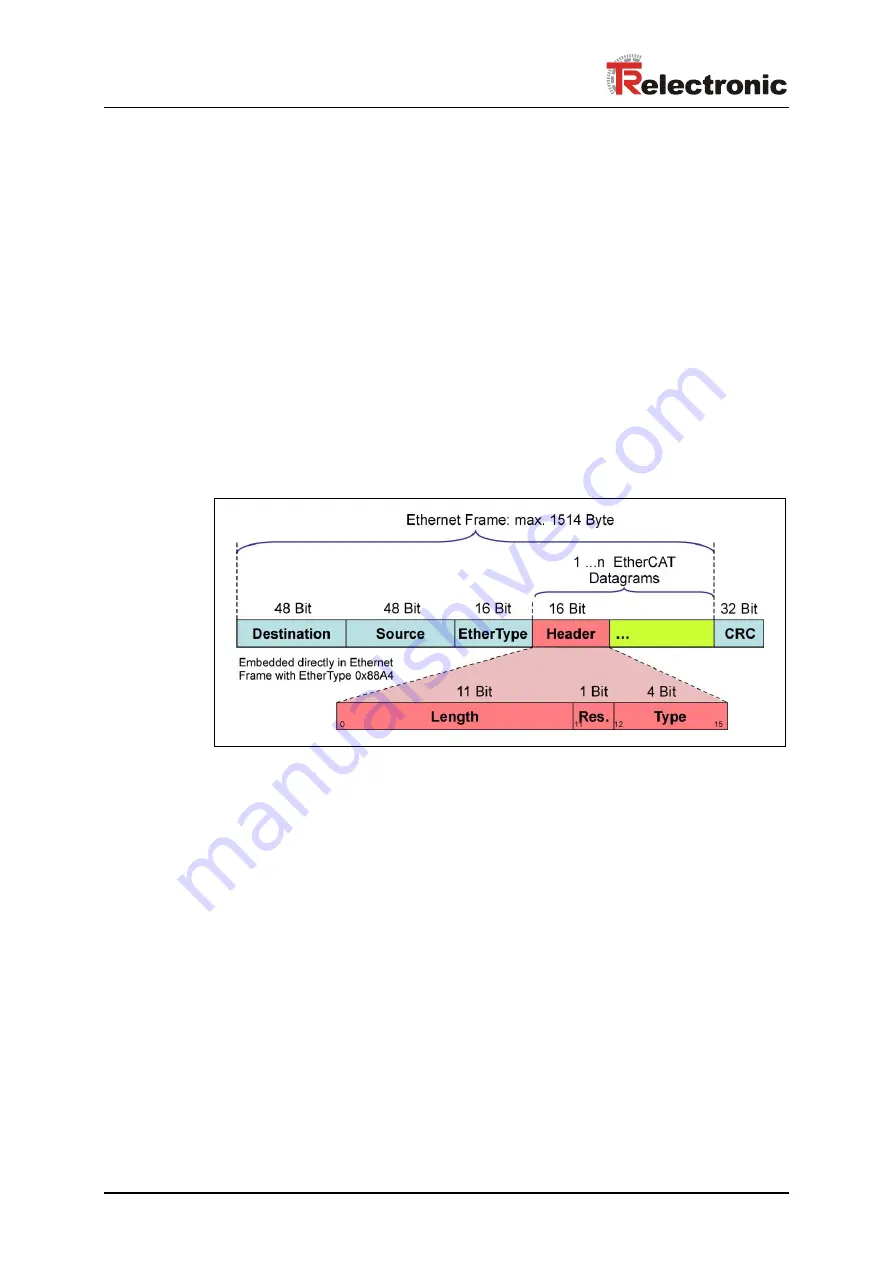
The EtherCAT protocol, optimized for process data, is transported directly in the
Ethernet frame via a special Ether type. A complete transmission can consist of
several sub-frames. The data sequence is independent of the physical sequence of
the slaves in the network. The addressing can be freely selected:
Broadcast, Multicast and lateral communication between slaves are possible.
The protocol also supports acyclical parameter communication. The structure and
meaning of the parameters is predetermined by the device profile
"CANopen Device
Profile for Encoder CiA DS-406"
.
UDP/IP datagrams are not supported. This means that the master and the EtherCAT
slaves must be located in the same subnet. Communication across routers into other
subnets is thus not possible.
EtherCAT exclusively uses standard frames in accordance with IEEE802.3 without
shortening. EtherCAT frames can thus be sent by any Ethernet controllers (master),
and standard tools (e.g. monitor) can be used.
Figure 2: Ethernet frame structure
4.3 Distributed clocks
When spatially distributed processes require simultaneous actions, exact
synchronization of the subscribers in the network is necessary. For example, in the
case of applications in which several servo axes must execute simultaneously
coordinated sequences.
For this purpose the "Distributed clocks" function in accordance with standard IEEE
1588 is available in EtherCAT.
As the communication uses a ring structure, the master clock can exactly determine
the runtime offset to the individual slave clocks, and also vice-versa. The distributed
clocks can be readjusted across the network on the basis of this determined value.
The jitter of this time base is well below 1µs.
Distributed clocks can also be used efficiently for position detection, as they provide
exact information at a local time point of the data acquisition. Through the system, the
accuracy of a speed calculation no longer depends on the jitter of the communication
system.