





























2700-4001_22 IMA Manual
30
Last Revision: 12/14/2021
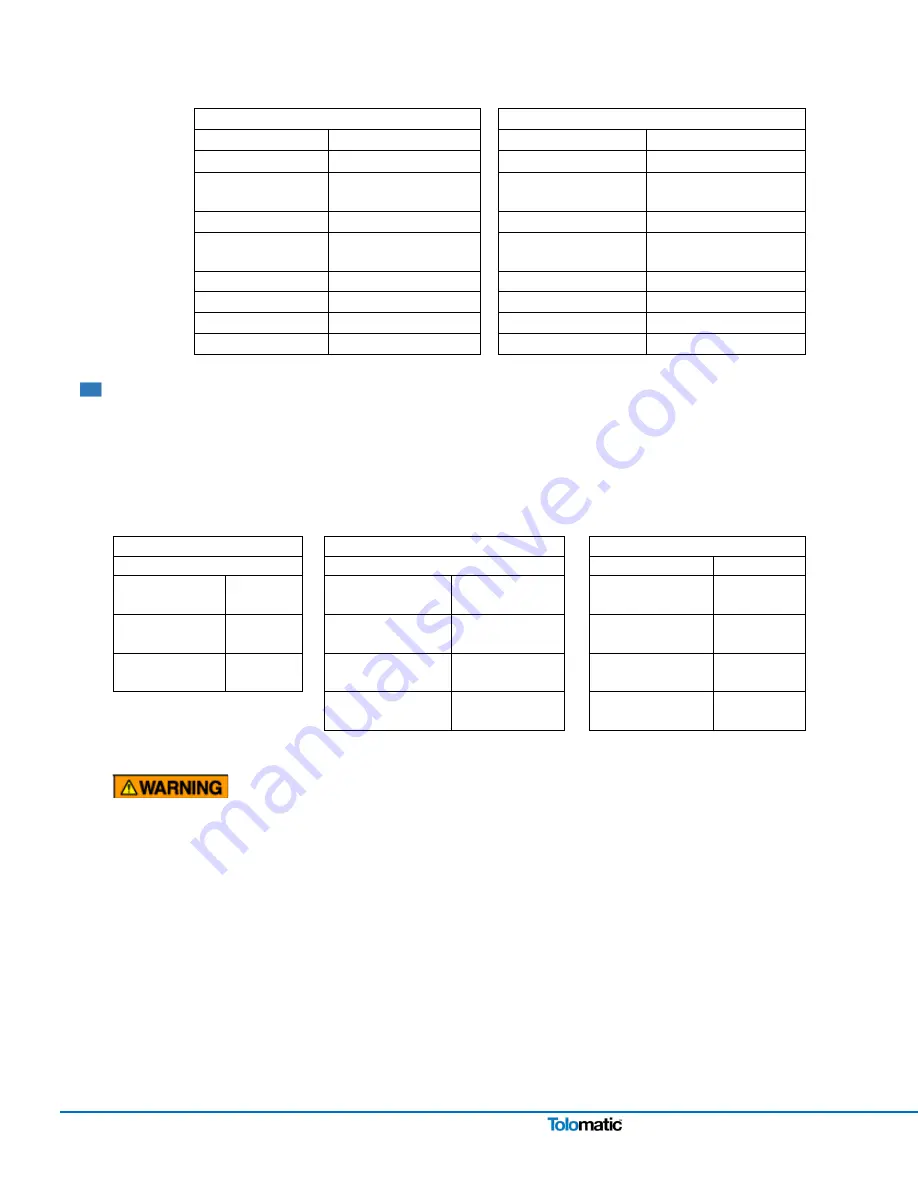
IMA22, IMA33, IMA44, IMA55
IMA22, IMA33, IMA44, IMA55
RESOLVER
Dynapar BRC
RESOLVER
Dynapar BRX
Input Voltage
7 Vrms (+/- 10%)
Input Voltage
4 Vrms (+/- 5%)
Excitation
Frequency
10 kHz
Excitation Frequency 5 kHz
Max Input Current 40 mA
Max Input Current
45 mA
Transformation
Ratio
0.5 (+/-10%)
Transformation Ratio 0.5 (+/-10%)
Impedance [ZRO]
205 Ohms
Impedance [ZRO]
129 Ohms
Impedance [ZRS]
187 Ohms
Impedance [ZRS]
120 Ohms
Impedance [ZSO]
495 Ohms
Impedance [ZSO]
461 Ohms
Impedance [ZSS]
447 Ohms
Impedance [ZSS]
427 Ohms
5.6 Thermal Sensor Specifications
Most of the motor windings have an integral normally closed thermal switch. The switch opens at a temperature of
100°C (212° F), which is the windings maximum operating temperature. The Rockwell VPL connector (DA2) will
include a Vishay Thermistor for measuring the temperature. The Siemens connector (DS1) will include a PT1000
thermistor for measuring the temperature. The thermal switch/sensor is meant to protect the windings, the
actuators continuous operating region must still be obeyed. Cycles that cause the windings temperature to
approach 100°C (212° F) will reduce the expected life of the actuator.
All Except DS1
DS1 (Siemens)
DA2 (Rockwell VPL)
Thermal Switch
PT1000 Thermal Transistor
Vishay
Opens at:
100°C
(212°F)
Make / Model
TE
PTFD102B1G0
Make/Model
NTCLE213-
E3103FLyy
Recommended
Current
1.0 ADC
Nominal Resi-
stance @ 0° C
1000 Ohms
Nominal Resi-
stance @ 0° C
1000 Ohms
Max Voltage
14 VDC
Temp Coefficient
of Resistance
3850 ppm
Temp Coefficient
of Resistance
3850 ppm
Measuring
Current
0.5 mA
Measuring
Current
0.5 mA
• Don't exceed rated motor voltage.
• Refer to Servo Drive User Manual for wiring instructions.
• Electrical connections and cabling should receive special attention during component selection and system
design when utilizing servo motor controlled systems. The feedback cable consists of twisted pairs of wires in
addition to an outer cable shield.
• Improperly wiring the feedback cable can cause unstable operation, incorrect operation or no operation at all.
• In some cases, improper current limits set in the drive, along with incorrect wiring of the feedback cable can lead
to damage of the motor.







































































