THORLABS
11
Chapter 4
Operation
4.1 Manual Differential Drives and Differential Micrometer Drives
4.1.1 Adjusting Micrometer Drives
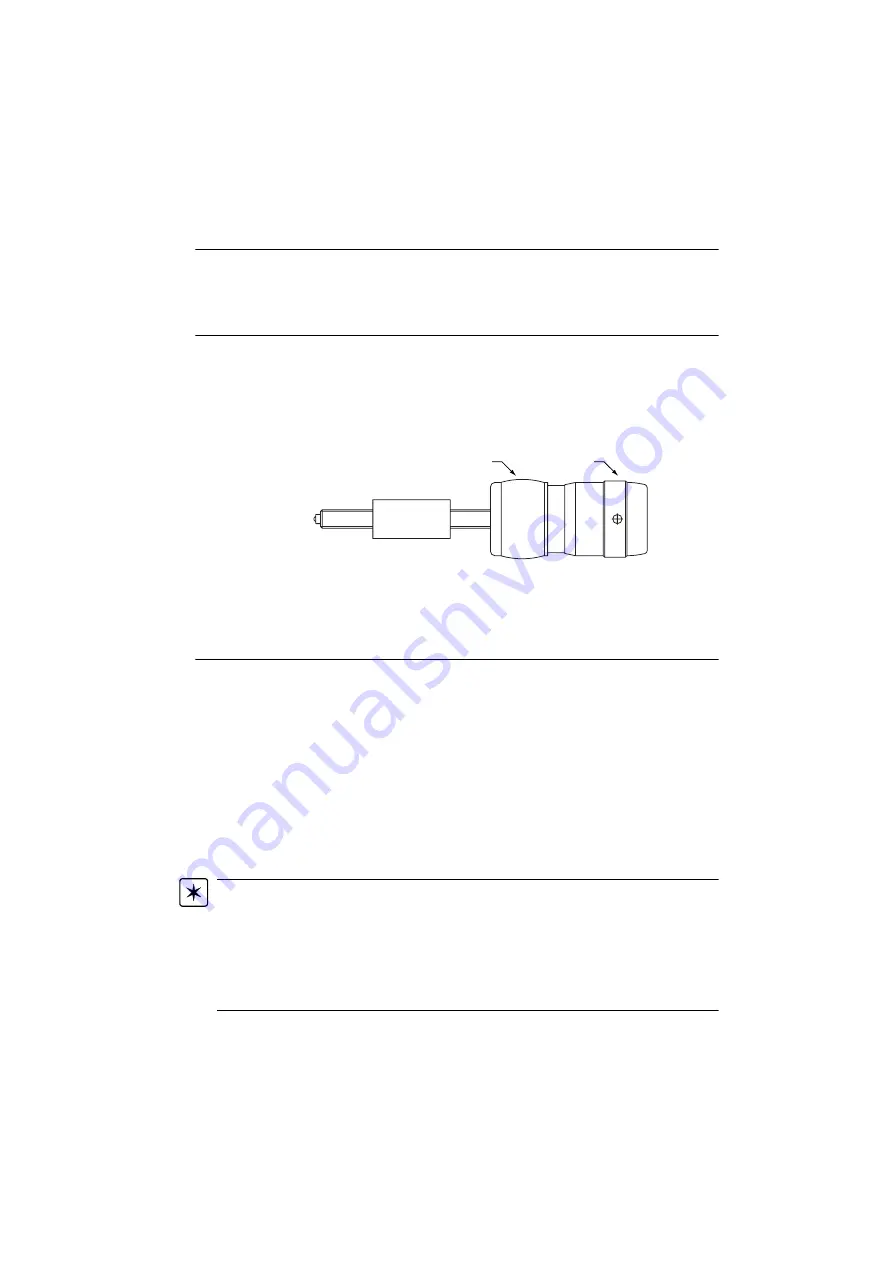
Turn the coarse adjuster clockwise until the platform begins to move. By careful use
of the fine adjuster, sub-micron resolution is now achievable.
Fig. 4.1 Adjusting a differential drive
4.2 Motor Drives
When used together with the associated Thorlabs Motor Controller the stepper motor
and DC motor drives allow fully automatic control of the stage.
Basic steps in controlling the stage are as follows:
1) Set commands to configure each axis (setting velocities, accelerations etc.) – see
the handbook for relevant NanoStep controller.
2) Move each axis to its home position, to establish a zero datum.
3) Set commands to move each axis by relative and absolute amounts – see the
APTServer
helpfile supplied with the APT server for more information.
A default configuration is set at the factory and stored in the non-volatile memory of
the NanoStep controller – see and Table 4.2 on the next page.
Notes
.
• If the axis is driven towards the –ve limit, at a certain position the platform stops moving
while the drive itself continues to move until the limit switch is reached. The drive must
then be moved positively by a certain distance before the platform begins to move. This
distance is just less than the offset.
• When creating a program to control the stage, it is preferable to avoid running into the
limit switches.
coarse adjuster
fine adjuster
Содержание LNR50 Series
Страница 1: ...Motion Control Linear Long travel Translation Stage LNR50 Series ...
Страница 4: ...2 Intentionally Blank ...
Страница 6: ...4 Intentionally Blank ...
Страница 8: ...6 Intentionally Blank ...
Страница 11: ...THORLABS 9 Linear Long Travel Translation Stage Fig 3 3 DC servo motor drive ...
Страница 26: ...24 Intentionally Blank ...