





























PROGRAMMING
SAMPLE PROGRAM FOR THE DANCING BOT
1. Place the Dancing Bot in an open area.
2. Load the app on your tablet or smartphone and establish a
Bluetooth connection between the app and the robot. Refer back to
page 7 for instructions.
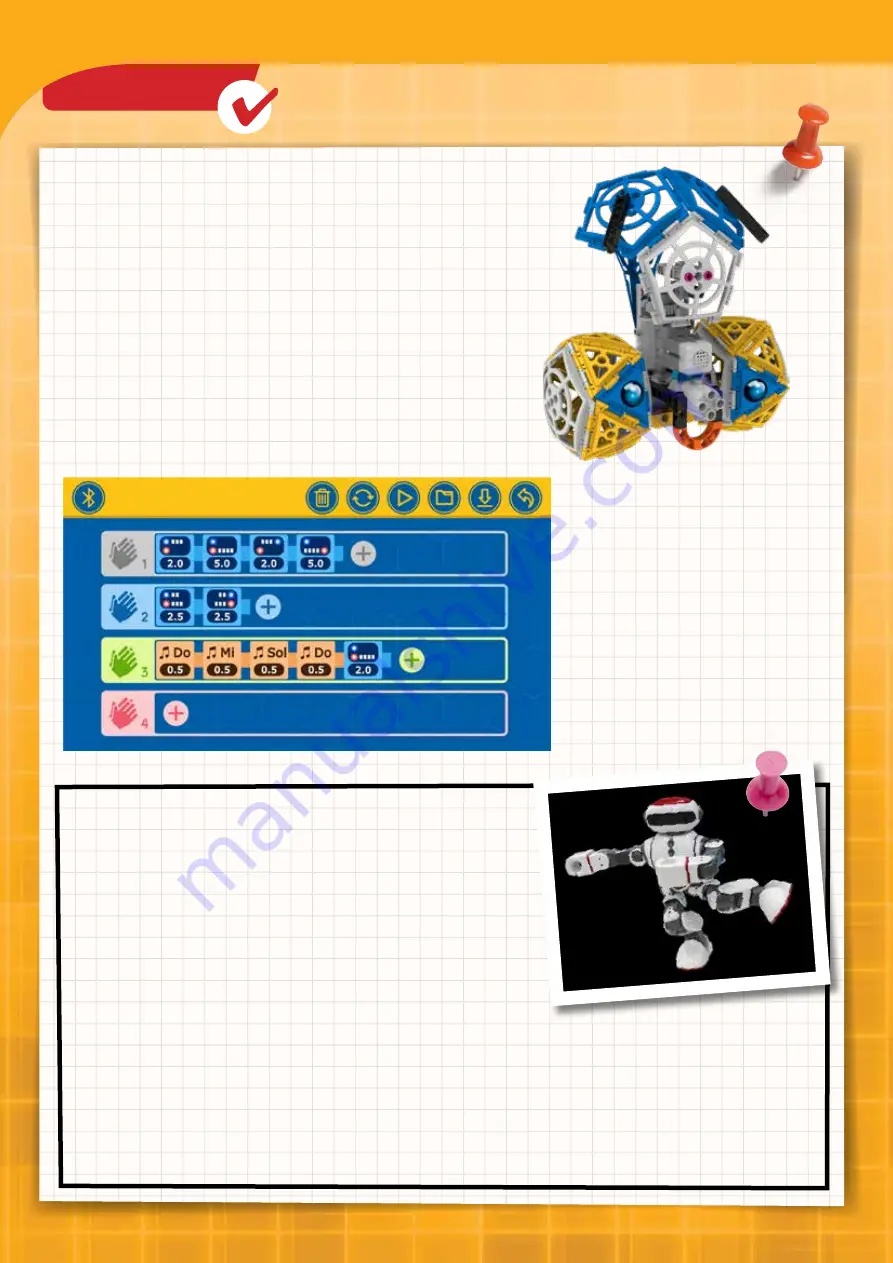
3. In programming mode, load
Program 5. The command sequences
shown below are preset in Program 5. Tap the run button and clap
your hands one to four times near the sound sensor.
4. Observe how the robot behaves for each sequence! Write your own
program in the four-clap sequence.
PROGRAM 5
1 Clap: Go forward, shake head, go
backward, shake head
2 Claps: Move and shake head at the
same time (dance)
3 Claps: Play a song and dance
4 Claps: Create your own program!
Dancing Robots
Have you ever seen a robot dance? Or, have
you ever seen someone do the dance move
called “the robot?” Robot engineers have been
inspired by dancers — and dancers have been
inspired by robots — for a long time!
Robots’ movements are controlled by
programs and sensor input. In many ways, a
choreographed dance performance is a lot like
a program that controls a robot’s movement.
Choreography is the artistic practice of
creating sequences of movements for bodies
that define the motion and/or the orientation of
the bodies over a duration of time. In the same
way, a robot’s program is a sequence of
defined movements that the robot performs
over time. The big difference is that humans
are much more capable of subtle, refined
movements, improvisation, and expressing
emotion through dance. But robots are
getting more human-like every year. Do
you think robots will dance as well as
humans someday?
46
Содержание SUPERSPHERE
Страница 33: ...18 12 13 14 15 16 17 31 Bigfoot Bot x4 x2...
Страница 34: ...19 20 19 32 x2 BIGFOOT BOT Feetdone Fold and connect the shell pieces at the joints...
Страница 41: ...39 Front body Back body Penguin Bot 28 29 Side view Side view Frontbodyassemblydone...
Страница 42: ...40 PENGUIN BOT 31 x2 motor A motor B Done 30...
Страница 45: ...43 30 mm axle 30 mm axle 6 7 8 9 10 11 12 Dancing Bot Front view...
Страница 46: ...44 13 x2 13 14 DANCING BOT Wheels done Fold and connect the shell pieces at the joints...
Страница 50: ...48 30 mm axle x2 5 9 10 11 6 7 8 HORSESHOE CRAB BOT...
Страница 52: ...50 15 16 14 HORSESHOE CRAB BOT...
Страница 53: ...51 Horseshoe Crab Bot 18 19 17 Shelldone...
Страница 54: ...52 20 motor A motor B Done HORSESHOE CRAB BOT...
Страница 57: ...55 Cornhole Bot 9 10 7 8...
Страница 58: ...56 CORNHOLE BOT 11 12...
Страница 62: ...fold and link the joint Solutions 60 GEOMETRIC SHAPES LESSON 1 2 3 4 5 x4...
Страница 64: ...620384 03 190620...





















































