
























Technosoft 2020
11
iPOS80x0 BX-CAN/-CAT Technical Reference
2.3
Identification Labels
Figure 2.3.1.
iPOS80x0 BX-CAx identification labels
The iPOS80x0 BX can have the following part numbers and names on the identification label:
p.n.
P029.025.E201
name iPOS8010 BX-CAN – CAN execution, 10A nominal current
p.n.
P029.026.E201
name iPOS8020 BX-CAN – CAN execution, 20A nominal current
p.n.
P029.025.E221
name iPOS8010 BX-CAT – EtherCAT execution, 10A nominal current
p.n.
P029.026.E221
name iPOS8020 BX-CAT – EtherCAT execution, 20A nominal current
2.4
Supported Motor-Sensor Configurations
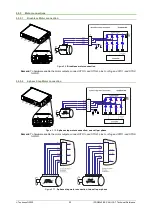
2.4.1
Single loop configurations
The position and/or speed are controlled using one feedback sensor. The other available feedback sensor
input can be used for External reference Position or Velocity, Pulse and Direction, Electronic Gearing or Camming.
*The drive can be delivered with FDBK#1 as single ended upon request
Motor
Sensor
Brushless
PMSM
Brushless
BLDC
DC Brush Stepper
2 phase
Stepper
3 phase
Sensor type
Sensor location
Incr. encoder
FDBK #1* (diff.)
Yes
-
Yes
Yes
-
FDBK #2 (diff.)
Incr. e Digital Hall
FDBK #1* (diff.)
Digital
halls
interface
Yes
Yes
-
-
-
FDBK #2 (diff.)
SSI
FDBK #2 (diff.)
Yes
-
Yes
Yes
-
BiSS-C
FDBK #2 (diff.)
Yes
-
Yes
Yes
-
Analogue Sin/Cos encoder
FDBK #1* (diff.)
Yes
-
Yes
Yes
-
Tacho
Analogue input: Feedback
-
-
Yes
-
-
Open-loop (no sensor)
-
-
-
-
Yes
Yes
Open-loop (with step loss detection
using
Incr. Encoder/SinCos/SSI/BiSS)
FDBK #1* (diff.)
-
-
-
Yes
Yes
FDBK #2 (diff.)







































































