





























User manual - CONTROLLER PUR-94
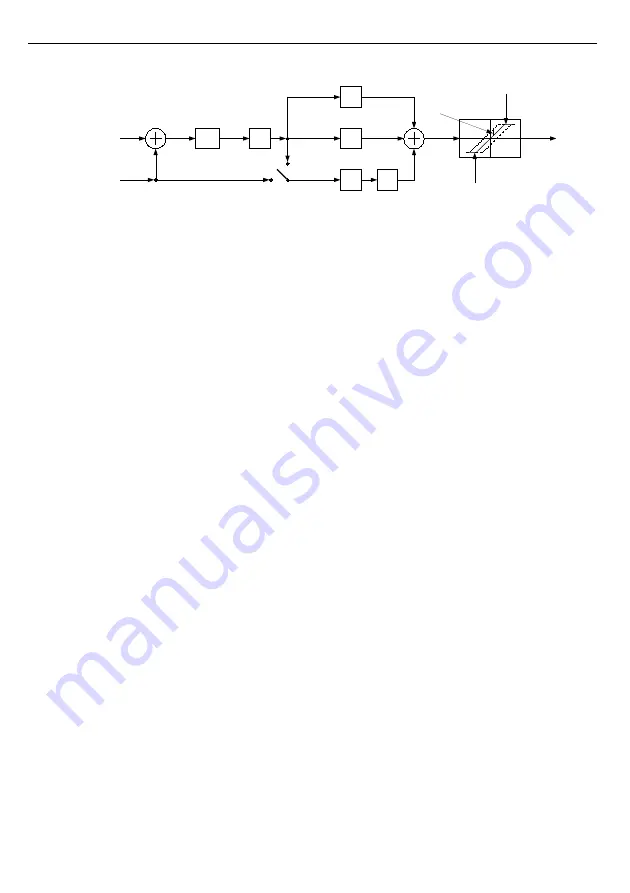
Figure 7.2.
General diagram of the PID controller featured in the
“m
odE”
- operating mode of the controllers:
“oFF”
- the controller is switched off. Outputs of control loops are set at idle, but all
their parameters are available for configuration,
“Pid”
- normal operating mode of the controller,
“At-F”
- the auto-tuning procedure for one of the control loops of the controller in an
arrangement with two actuator elements. Selection of the control loop to be
tuned depends on the setting of the
SetP
parameter. Following this procedure,
the device automatically switches to
PiD
mode,
“At-H”
- the auto-tuning procedure for the
PiD-H
loop in an arrangement with a single
actuator element. Once completed, the device automatically switches to
PiD
mode,
“At-C”
- the auto-tuning procedure for the
PID-C
loop in an arrangement with a single
actuator element. Once completed, the device automatically switches to
PiD
mode,
“SEtP”
- the setpoint of the controllers. The initial state of the controlled object to which the
controllers will progress,
“PArH”
-
PID-H
control loop coefficients,
“P -H”
- proportional gain factor
P
,
“tI-H”
- integral gain factor
I
,
“td-H”
- derivative gain factor
D
,
“OF-H”
- value by which control loop limitations are shifted,
“Lo-H”
- lower limit of the control loop’s characteristics,
“Hi-H”
- upper limit of the control loop’s characteristics.,
“PArC”
-
PID-C
control loop coefficients,
“P -C”
- proportional gain factor
P
,
“tI-C”
- integral gain factor
I
,
“td-C”
- derivative gain factor
D
,
“OF-C”
- value by which control loop limitations are shifted,
“Lo-C”
- lower limit of the control loop’s characteristics,
“Hi-C”
- upper limit of the control loop’s characteristics,
44
LooP
Err
1
P
-H
P
-C
t
I
-H
t
I
-C
t
d
-H
t
d
-C
dEAd
InEr
Dead zone
Proportional
block
Integral
block
Derivative
block
Inertial
block
Feedback
Output
limits
Setpoint
SEtP
or
Fuzzy
setpoint
Upper limit
Hi-H
Hi-C
Lower limit
Lo-H
Lo-C
Offset
OF-H
OF-C





















































