




















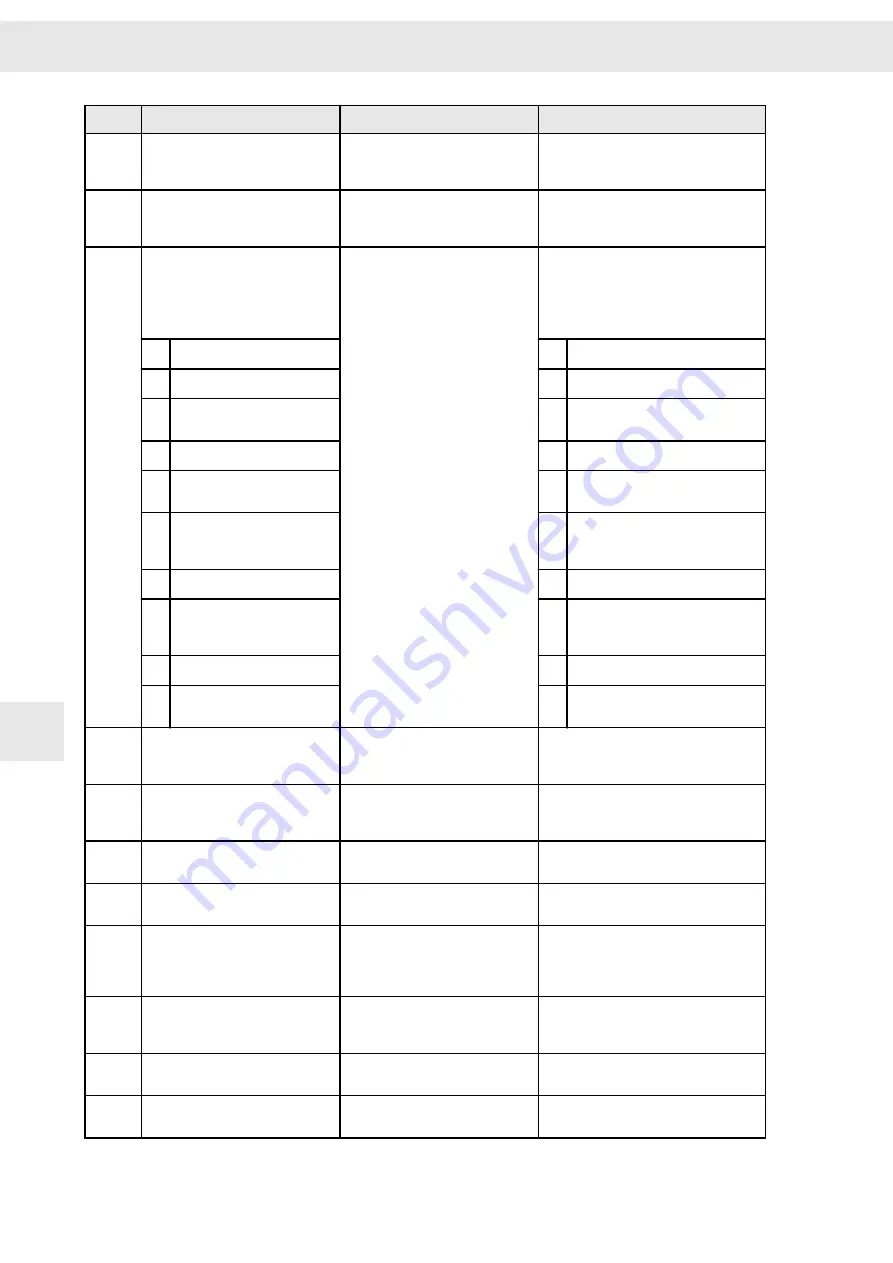
Code
Error message
Error reaction
Possible reason
E09
(0x109)
Hiperface / EnDat OEM data
incorrect
No "Ready" for startup
▶
Number of motor pole pairs in
EnDat/Hiperface encoder does not
match the parameter set.
E10
(0x10A)
drive-setup-tool heartbeat
Motor is stopped by quick stop
ramp and drive is disabled
(controlled standstill).
▶
drive-setup-tool was not able to
communicate with the drive in the
parameterized monitoring time.
E11
(0x10B)
Communication / bus system error
▶
1
SERVOLINK 4
▶
2
DNC 8 Byte
▶
3
CAN bus
▶
4
EtherCAT
Motor is stopped by parameter-
driven ramp and drive is disabled
(controlled standstill).
Monitoring of bus communication led to
switch-off:
1
Faulty telegram ID
1
1
Faulty reference value telegram
2
Zero data telegram
1
2
Higher-ranking control not active
3
CRC error
1
3
Check sum error, interferences
during transmission
4
Synchronization error
1, 4
4
Drive telegram not synchronized
5
Configuration error
4
5
Faulty configuration of mailbox,
PDO, watchdog or synchronization
6
NMT error
2, 3, 4
6
Control channel of bus system
was not active during switch-on
(pre-operational)
7
Addressing error
4
7
Faulty drive address
8
Node Guarding
3
8
Communication node monitoring:
monitoring time expired (configu‐
rable)
9
EEPROM error
4
9
Error in EtherCAT EEPROM
10 Heartbeat / Watchdog
2, 3, 4
10 Heartbeat monitoring: monitoring
time expired (configurable)
E12
(0x10C)
Mains 'Ready for operation' is
missing
Motor is stopped by parameter-
driven ramp and drive is disabled
(controlled standstill).
▶
Power output stage was switched
on, when mains supply was discon‐
nected/interrupted.
E15
(0x10F)
Endat / Hiperface communication
faulty
Motor is stopped by quick stop
ramp and drive is disabled
(controlled standstill).
▶
Communication of EnDat/Hiperface
is faulty.
E17
(0x311)
FPGA power output stage shut‐
down
Motor is stopped immediately.
▶
Overload in power supply unit
E18
(0x312)
Error in spindle selection
Motor is stopped immediately.
▶
Spindle selection was not valid at
“Switch on”.
E25
(0x319)
Power supply load too high
Drive is stopped by limitation of
motor torque.
▶
Output power of drive is greater
than rated power of power supply
unit, since the dimensioning of
drive and motor are not compatible.
E26
(0x31A)
Motor temperature too high
Motor is stopped by error ramp
and current limitation.
▶
Wrong parameters entered for the
motor or wrong dimensioning of the
motor
E27
(0x31B)
Ambient temperature too high
Motor is stopped by error ramp
and current limitation.
▶
Insufficient device cooling
E28
(0x31C)
Power output stage temperature
too high
Motor is stopped by error ramp
and current limitation.
▶
Insufficient cooling of power output
stage (heat sink)
Error Messages
W
60
Drive System SD2 - Safety Functions SFM / SLOF
10
Содержание SD2
Страница 1: ...Drive System SD2 Safety Functions SFM SLOF P TD 0000426 12 2019 08 28 SIEB MEYER W ...
Страница 4: ...Chapter Overview W 4 Drive System SD2 Safety Functions SFM SLOF ...
Страница 10: ...General Information W 10 Drive System SD2 Safety Functions SFM SLOF 2 ...
Страница 16: ...Safe Frequency Monitor SFM W 16 Drive System SD2 Safety Functions SFM SLOF 3 ...
Страница 44: ...Fieldbus Communication W 44 Drive System SD2 Safety Functions SFM SLOF 6 ...
Страница 56: ...OSSD Signals W 56 Drive System SD2 Safety Functions SFM SLOF 8 ...
Страница 66: ...Error Messages W 66 Drive System SD2 Safety Functions SFM SLOF 10 ...







































































