




























Beginner Level Robot Series
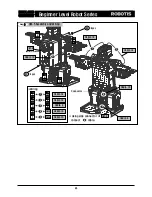
(2) Assembling
※Assemble 2 sets using and
F13
F14
motor
2
※Insert nuts
motor
4
※Attach nut stickers :
Left Wheel : 2 sets
Step
1
Sticker
:2pcs
motor
2
motor
4
※Assemble taking
note of the inserted
location of nuts .
F3
Make sure nuts do
not come off.
S1 : 4pcs
N
1
: 4pcs
S2
: 4pcs
N
1
: 4pcs
※Assemble 2 sets using and
F3
motor
1
motor
3
※Insert nuts
※Attach nut stickers :
motor
3
motor
1
Right Wheel : 2 sets
Step
2
Sticker
:2pcs
※Assemble taking
note of the inserted
location of nuts .
F14
F13
Make sure nuts do
not come off.
N1
: 4pcs
N1 : 4pcs
S1
: 4pcs
S2
: 4pcs
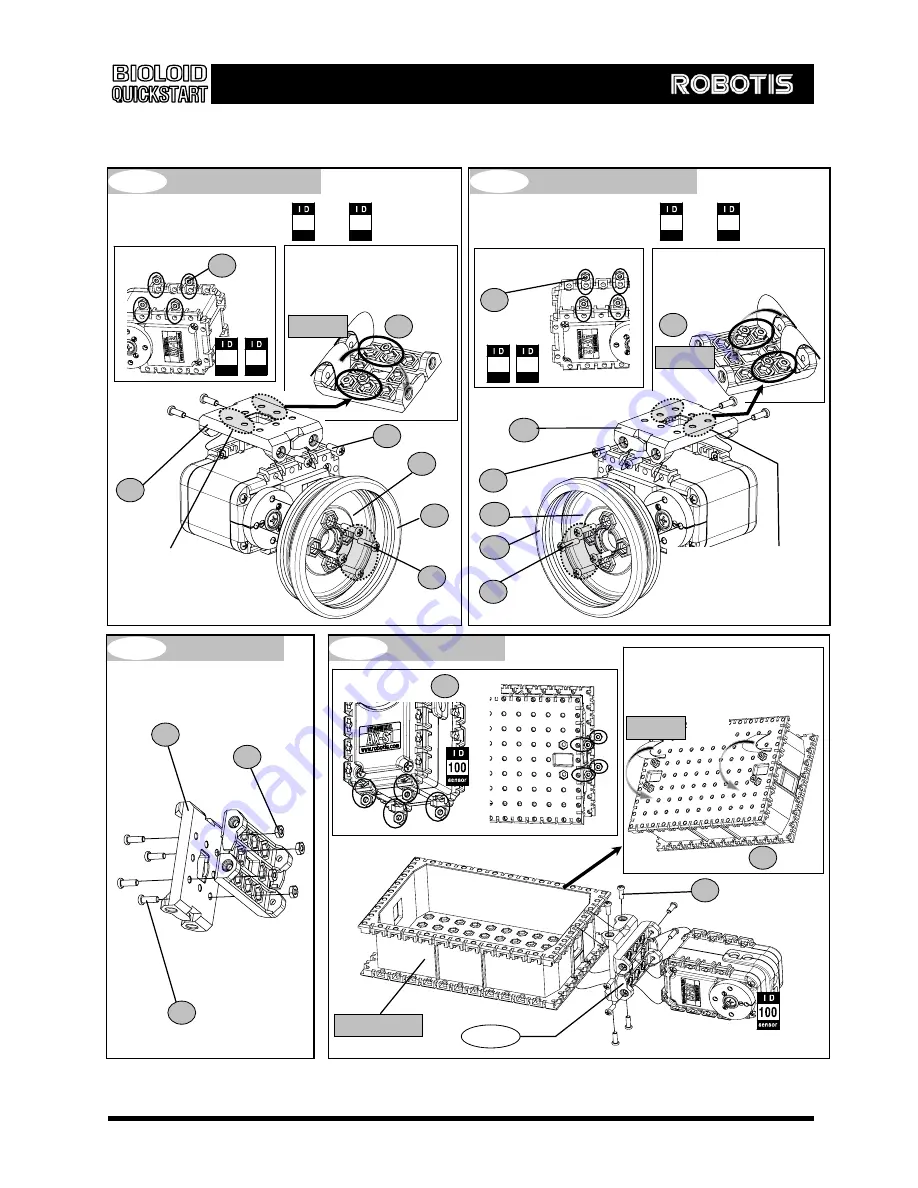
Joint
Step
3
F3 : 2pcs
N1 : 4pcs
S1 : 4pcs
ADAPTOR-CM5
※Insert nuts
※Attach nut stickers :
Head
Step
4
Step
3
Sticker :2pcs
: 4pcs
N1 : 4pcs
S1 : 8pcs
Make sure nuts do not
come off.
N1
74
Содержание Beginner level robot series
Страница 1: ...v1 0 Closer to Real ROBOTIS CO LTD www robotis com Bioloid QuickStart Beginner Level Robot Series ...
Страница 3: ...Beginner Level Robot Series 1 Starting Bioloid 3 ...
Страница 10: ...Beginner Level Robot Series 2 Assembling Bioloid 10 ...
Страница 90: ...Beginner Level Robot Series 3 Bioloid Operation and Maintenance 90 ...







































































