





























13
14
15
16
17
×
4
B-03
B-09
B-02
B-10
10
×
4
B-08
B-12
B-10
11
×
1
8
×
46
Bearing 1
轴承
1
B-04
19
×
3 (Add M5 Locknut)
(加
M5
防松螺母)
18
×
1
8
×
46
8
×
12
14
×
4
(Add M3 Locknut on the opposite side)
(
对侧加
M3
防松螺母
)
B-05
RoboMaster M3508 P19
Brushless DC Gear Motor
RoboMaster M3508 P19
直流无刷减速电机
RoboMaster Mecanum
Wheel
RoboMaster
麦克纳姆轮
B-01
B-11
B-07
B-06
Содержание Type A 2020
Страница 1: ...RoboMaster Type A 2020 Self Assembly Robot 竞赛机器人 2020 自组装版 A 型 2020 11 ...
Страница 2: ......
Страница 14: ......
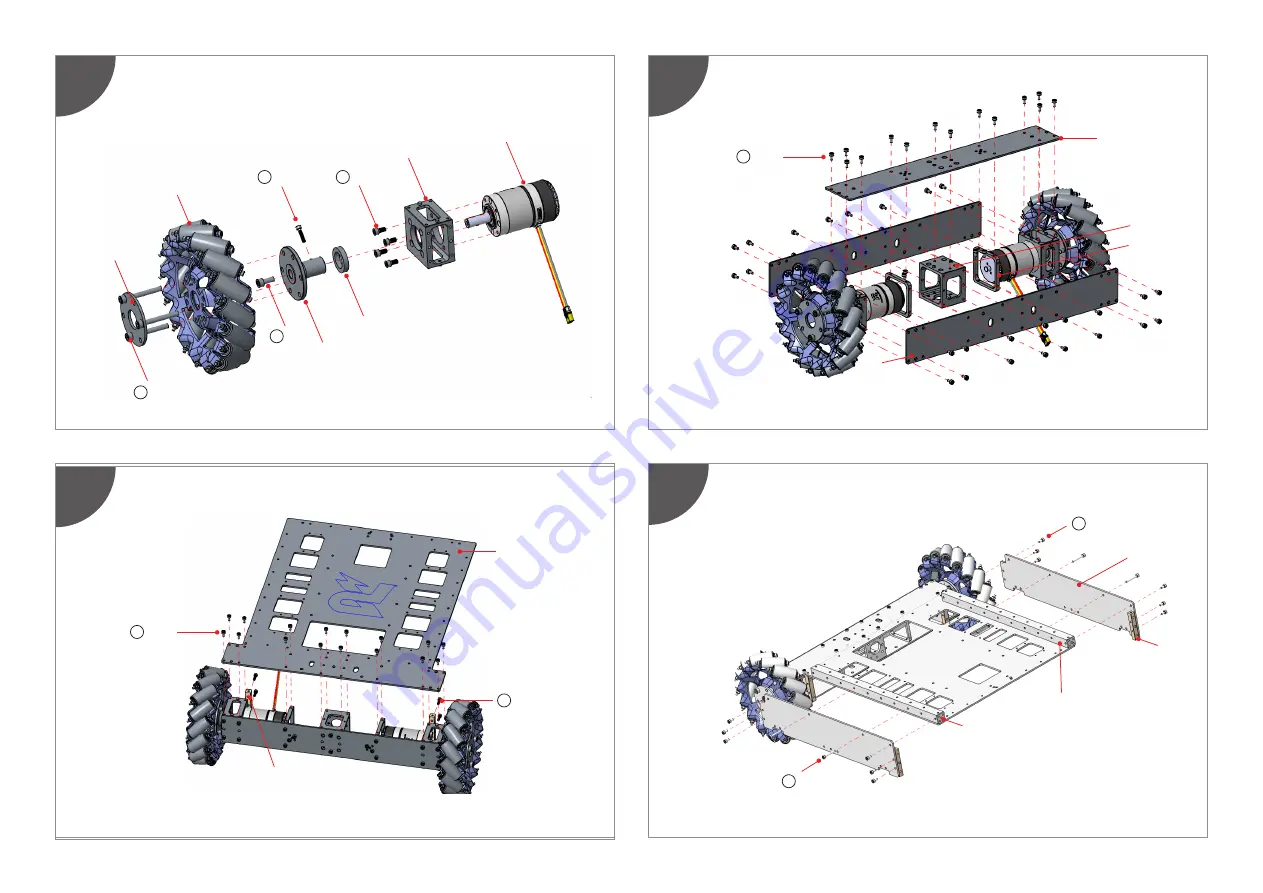
Страница 15: ...第一步 组装底盘上部 Step 1 Assembling Top of Chassis ...
Страница 19: ...第二步 组装底盘下部 Step 2 Assembling Bottom of Chassis ...
Страница 24: ...第三步 组装发射机构 Step 3 Assembling Launching Mechanism ...
Страница 27: ...37 4 4 C 11 RoboMaster Development Board Type C RoboMaster 开发板 C 型 Cabling Step 1 接线步骤 1 Cabling Step 2 接线步骤 2 ...
Страница 28: ...第四步 组装云台 Step 4 Assembling Gimbal ...
Страница 35: ...Cable 3 线材 3 Cabling Step 8 2 接线步骤 8 2 Cabling Step 9 1 接线步骤 9 1 ...
Страница 36: ...第五步 整车装配 Step 5 Assembling Whole Robot ...
Страница 37: ...13 4 8 8 8 8 14 10 9 4 57 58 59 60 D 23 D 25 D 24 9 2 8 2 ...
Страница 40: ......






































































