


























SOFTCLAW —
37
defualt
button: deselect the grasp
edit
button: change the name of the selected grasp;
delete
button: delete the selected grasp.
In all the cases, the values shown are the ones sent to the qb SoftClaw while the program is
running. Thanks to
Try
it!
and
Release
buttons you can test it without starting the Robot program.
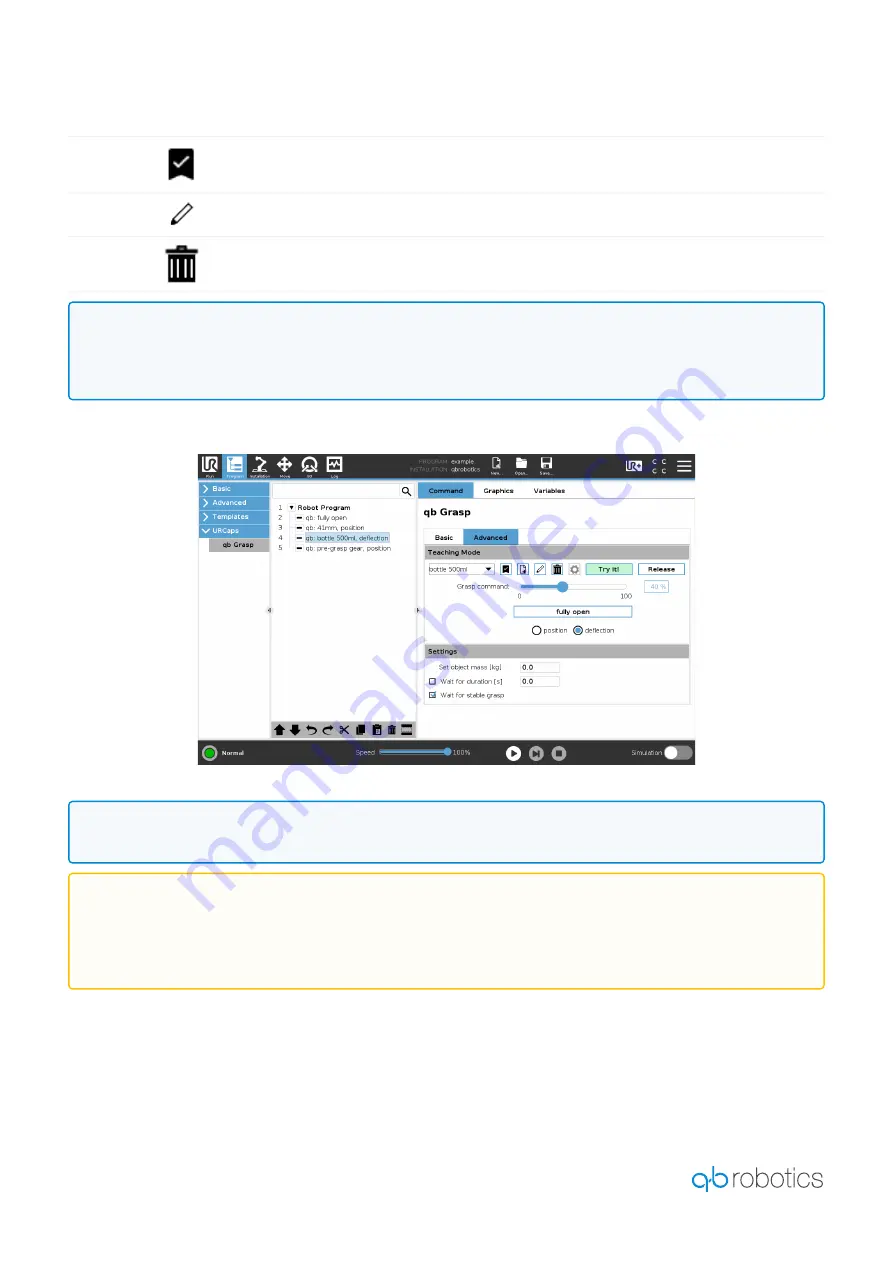
Figure 12. —
Advanced Panel in Program Node
Settings Panel
If you are grasping an object with a known mass, you can add it in the proper field to automatically sum it
up with the qb SoftClaw one. Remember to set it to 0 when you release the object.
If you have selected a stored grasp and change its command value through the slider or its
control mode, you change not only the current Program Node value, but every linked grasp
with the same name.
This is made on purpose.
As for the Installation Node, the small "gear" does nothing at the current state and will be
enabled in the following releases.
On both CB and e-series, when you press the Save icon or Save Program As... the installation
file is also saved automatically. Since in our case both Program Node and installation Node are
synchronized, any changes in variables or additions with the teaching mode panel will be
permanently saved in the installation file when the program is saved. Pay attention or create a
backup file if you want to restore the previous values.







































































