






















44
28 aprile 2021
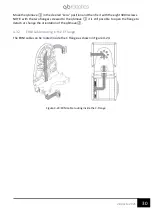
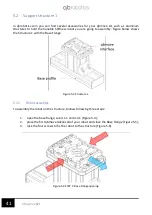
5.2.2.2
Configuration Arm 2
Figure 5-8 Variable Stiffness robot Arm 2 and its DoF on the structure 1.
This configuration has a first vertical joint, the second one is horizontally placed end the third is
rotated 90 ° compared to the previous one.
We suggest to set the qbmove ID from the bottom (ID 1) to the gripper (ID 4).
Содержание qbmove Advanced Kit
Страница 1: ...Please read these instructions before use Do not discard keep for future reference User manual KIT ...
Страница 2: ...www qbrobotics com ...
Страница 14: ...11 28 aprile 2021 Dimensions of the flanges Figure 3 5 C Flange dimensions Figure 3 6 Base flange dimensions ...
Страница 15: ...12 28 aprile 2021 Figure 3 7 Snap on mechanism Figure 3 8 Examples of connection ...
Страница 40: ...37 28 aprile 2021 ...
Страница 63: ...60 28 aprile 2021 IMPORTANT Remember to power the qbmove or the chain before using it ...
Страница 97: ...94 28 aprile 2021 This page was intentionally left blank ...





















































