




















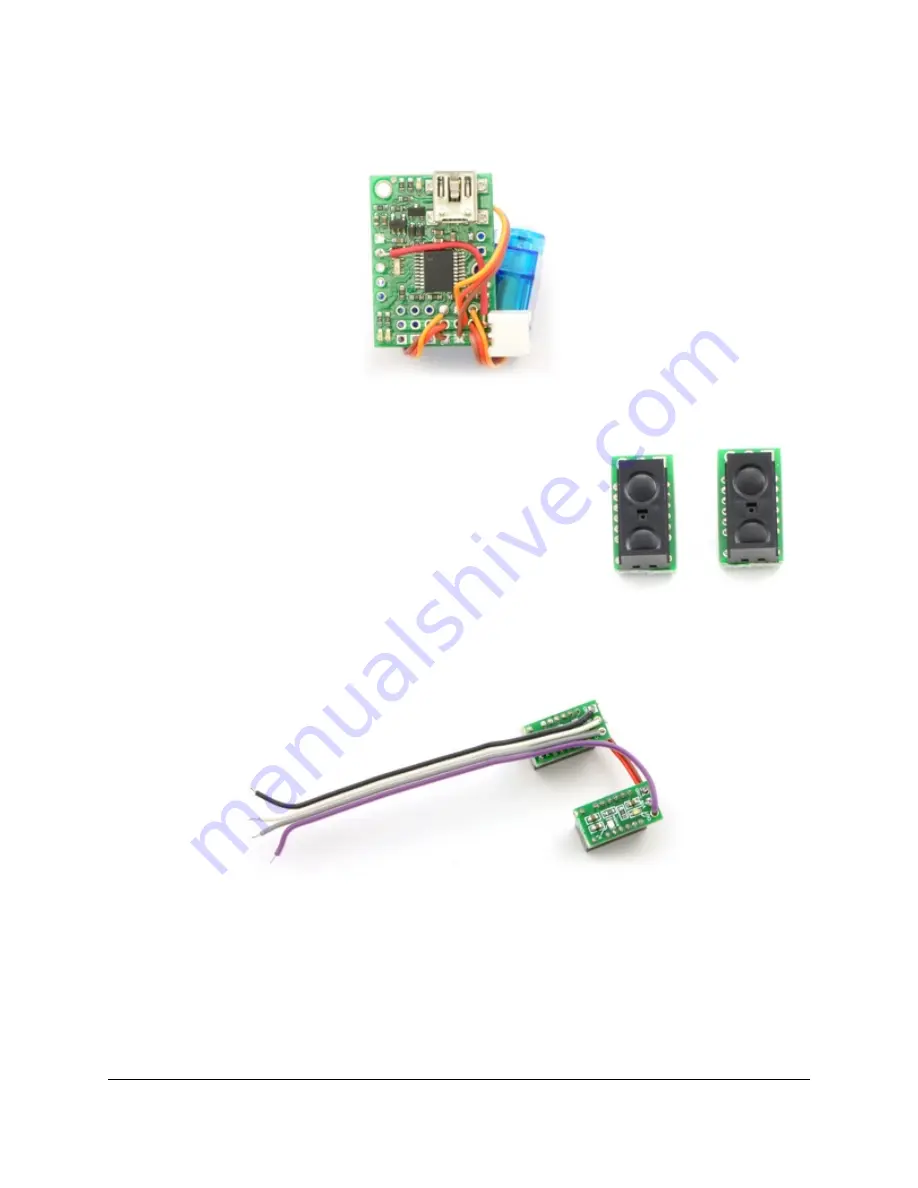
Digital distance sensors with
trimmed carrier boards.
Continue, soldering the right servo to channel 0 and the left servo to channel 2, so that the
servos are arranged in the same relative positions as the ports.
Connecting the servos to ports
0, 1, and 2 on the Micro Maestro.
Cut the sensor boards with a rotary tool, grinding wheel,
diagonal cutters, or a jeweler’s saw, removing the part
containing the unneeded mounting hole, so that they are as
small as possible. (Make sure you do not cut any traces.)
Then solder them to a cable so that you can connect them to
the Maestro. The example below uses a 4-wire ribbon cable,
sharing the power and ground connections for the two
sensors. Ribbon cable makes the assembly relatively clean,
but you can use whatever wire you have available. Look
ahead in the instructions to see where the sensors are going
to go, and make sure that you have a long enough cable.
Think about how to keep the wires close to the body and out
of the way of the legs and servos.
Soldering the sensors to a four-pin cable.
Solder the sensor power and ground to +5V and ground on the Maestro, and connect the
outputs of the right and left sensors to channels 3 and 4, respectively. Note that we use +5V
instead of the battery voltage so that the Maestro channels will never see higher voltages
– and another benefit is that the sensors will work under USB power, without the battery
plugged in.
Sample Project: Simple Hexapod Walker
© 2001–2010 Pololu Corporation
3. Construction
Page 8 of 21







































































