
























NOTE:
Port Forwarding must be configured on Router 2.
This procedure varies on different devices and instructions
should be available on Router 2 user manual.
4.7. Updating the firmware
If your device firmware version doesn’t match to software’s
firmware version while connecting to device via LPA
software you’ll be asked to update your device. If update
request pops-up, but you want to keep current firmware
and use LPA software, you must use software compatible
with that firmware version.
NOTE:
Compatible software had been delivered with
In order to update your device or rewrite device firmware -
USB cable
must be used (update through RS232 cable is
not available).
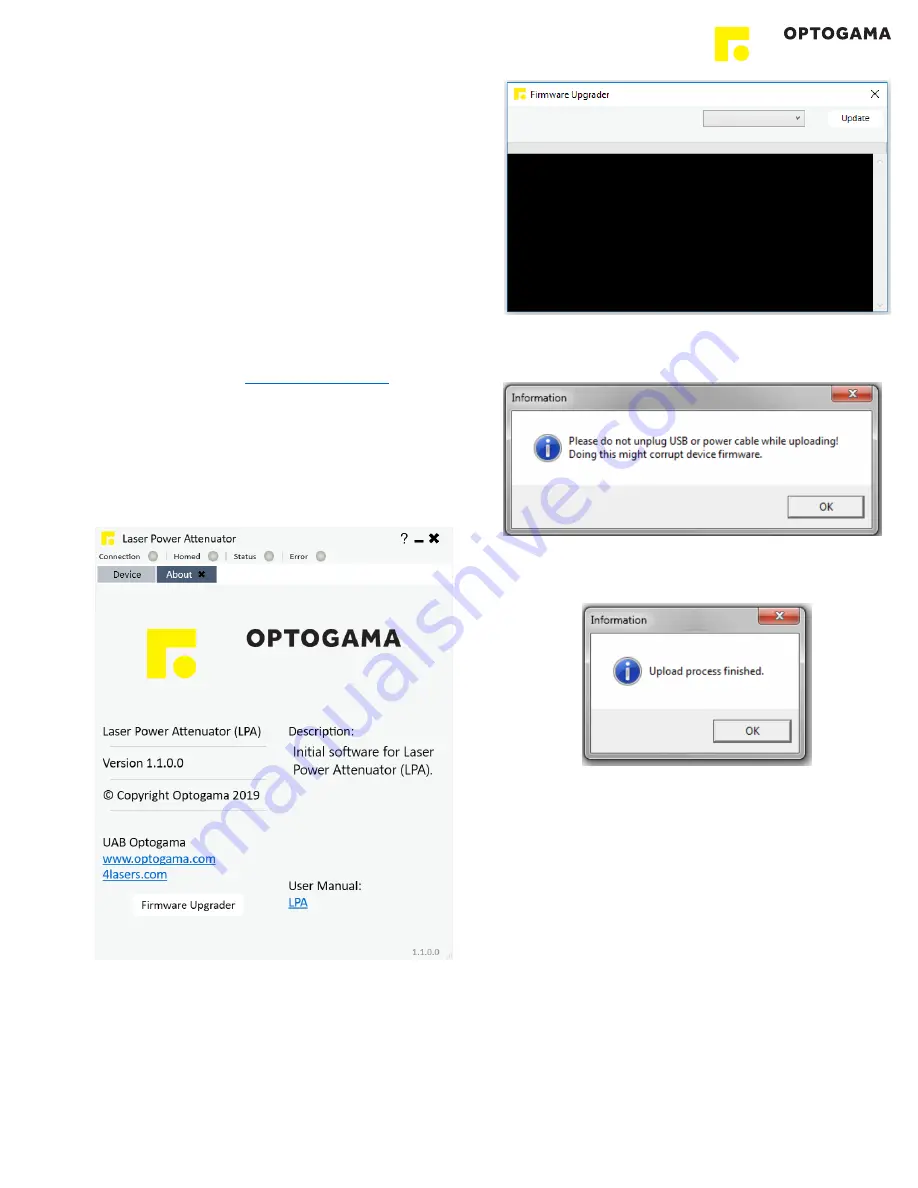
1. Click button
“Firmware Upgrader”
in the About tab of
MRO software:
2. In the opened window press “
Update
” button. You will
be asked if you really want to update device:
After a warning device
motors will be shut down
and
update will start:
3. Update should be done in about a minute. If everything
went successfully message box like this should pop-up:
Now you’re ready to go.
15
Содержание MRO
Страница 1: ...MANUAL v3 3 MRO MOTORISED ROTATOR KEY for DISCOVERIES ...
Страница 20: ...5 2 Serial communication example in Python 20 ...
Страница 21: ...6 Technical information 6 1 MRO drawings 21 ...
Страница 23: ...6 3 Power supply 23 ...
Страница 24: ...6 4 RS232 cables 24 ...
Страница 25: ...OPTOGAMA UAB Mokslininku str 2A LT 08412 Vilnius Lithuania 37052194884 sales optogama com www optogama com ...