





























Joint Robot Manipulator - Software Operation Manual
Advantech LNC Technology Co., Ltd.
37
1~N
:
Re-arrange the order in the description based on the column number of the program. The
main purpose of this motion is to let the operator understand the order of the operations,
so that when the insertion position is mishandled, it is convenient to know how to adjust
the order of the program lines.
Cut
:
Cut the contents of the selected column and paste it into the internal clipping area.
Copy
:
Copy the contents of the selected column and paste it into the internal clipping area.
Paste
:
Paste the contents of the internal clipping area onto the position of the selected column in
the list.
Up
:
Moves the currently selected column up.
Down
:
Moves the currently selected column down.
Back
:
If the current position is matched with the selected command line, pressing this button to
let the robot return along the path until the previous command point.
Forward
:
If the current position is matched with the selected command line, pressing this button
to allow the robot to forward along the path until the next command point.
Single-step
:
Move the robot to the position where the command line is currently selected.
Description: The single step, forward and back functions are especially suitable for
confirming the accuracy of the track and speeding up the debugging program.
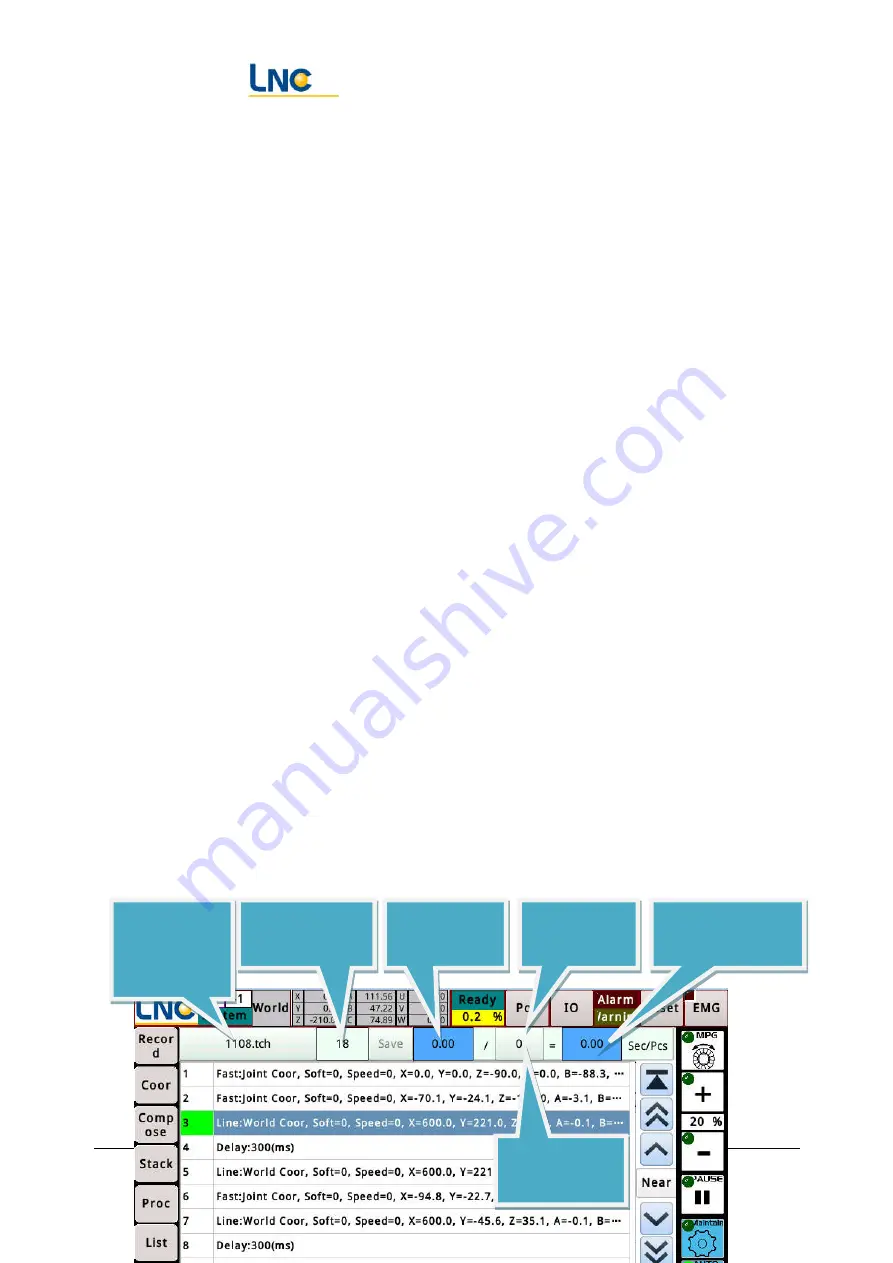
10.2.
Automatic mode
Current files
name of the
program
Total timing
time
Total number
of timings
Timed average
processing time
Click to zero
processing
Current
program lines
Содержание Robot Series
Страница 59: ...Joint Robot Manipulator Software Operation Manual Advantech LNC Technology Co Ltd 59 system ...
Страница 69: ...Joint Robot Manipulator Software Operation Manual Advantech LNC Technology Co Ltd 69 14 3 Calling G files ...
Страница 75: ...Joint Robot Manipulator Software Operation Manual Advantech LNC Technology Co Ltd 75 ...







































































