














5
Commissioning
DYNEO
®
Synchronous motors with permanent magnets-drive
4474 en - 2011.04 / e
LEROY-SOMER
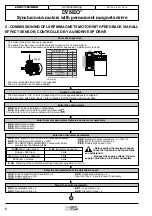
Measurement of the phase angle for the encoder or Hall effect sensor (
00.17
).
• Check that the motor is stopped and has been uncoupled from the load, then continue with autotuning.
• If a brake is present, check that it has been released (reactivate the brake after autotuning).
• Regardless of the required reference and direction of rotation, the autotuning procedure causes the motor
to run at very low speed.
Check that there is no danger to people and equipment.
• Once the procedure is complete, the motor stops automatically.
• The procedure can be interrupted at any time by sending a stop command, pressing the "STOP" button on
the parameter-setting interface (see STOP section 2.2.6 of manual ref. 3871) or opening the disable circuit.
•
00.42
: With rotation.
• Enable the drive (link terminals SDI1 - SDI2).
• Give a run forward command or run reverse command (in factory settings, close DI4 or DI5).
• The motor starts to turn. Wait until it stops completely and check that
00.42
= NO (autotuning complete).
• Remove the run command, disable the drive and check any changes in the value of
00.17
,
05.17
,
05.24
.
• In read mode, on the parameter-setting interface, the operating status displays “DISABLED” or “Encoder break”.
Switch on the drive
• Open the contact SDI1,SDI2.
• In parameter-setting mode, select basic parameters
•
00.45
Return to factory settings 50 Hz or 60 Hz, HIGH or LOW depending on the supply and the application
(
00.45
automatically returns to NO after a few seconds)
•
00.13
: SERVO. The drive displays “Encoder break”, continue with the procedure.
Select the control mode
•
00.06
: Motor rated current
•
00.07
: Motor rated speed
•
00.08
: Motor rated voltage
•
00.10
: Motor rated frequency
Enter the motor parameters indicated on the motor nameplate
•
00.14
: Type = HALL EFFECT or incremental UVW (depending of the sensor used)
•
00.15
: Drive encoder lines per revolution (not applicable to Hall Effect sensor)
• Clear the “Encoder break” trip with a RESET if necessary
Enter the characteristics of the incremental encoder with commutation channels or those of the Hall effect sensor
Enter the other motor and control parameters
• Enter the encoder phase angle (
α
)
manually in
00.17
,
located on the motor nameplate.
Possible to uncouple the motor?
YES
NO
Autotuning with rotation
• Couple the load
• Enable the drive (link terminals SDI1 - SDI2).
• Start the machine with no load and then on load, if necessary re-adjust the ramps (
00.03
,
00.04
) then the speed controller
gains via
00.18
(increase the factory settings in proportion with the inertia applied to the motor shaft),
00.19
and
00.16
.
Optimising performance
No autotuning
The drive is ready to operate, or waiting for additional parameter settings.
• If the drive trips, apart from “Encoder break”, refer to section 7 of the Powerdrive manual 3871.
A
•
00.02
: Max. speed < 140%
of the motor rated speed
00.07
•
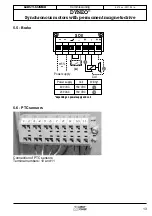
00.12
: The switching frequency value must be set according to the following table:
•
00.21
: CURRENT LOOP PROPORTIONAL GAIN =
κ
x kVA x Ld
with: -
κ
= 1 for 400/460V drives,
- kVA : Drive rating (example : 340 for a 340T),
- Ld : inductance value located on the motor nameplate in mH.
The recommended gain value should not be greater than 80 when the stator frequency is lower than 150 Hz.
00.07
(Motor rated speed)
00.12
(Switching frequency)
N.rated
≤
1800 rpm
1800 rpm < N.rated
≤
2400 rpm
2400 rpm < N.rated
≤
3600 rpm
3600 rpm < N.rated
≤
4500 rpm
4500 rpm < N.rated
3 kHz
4 kHz
4,5 kHz
5 kHz
6 kHz
• Before setting the maximum speed,
check that the motor and the machine
can withstand it.
• Respect the supply voltage “Inverter
supply” indicated on the motor nameplate.
Содержание DYNEO
Страница 1: ...DYNEO Synchronous motors with permanent magnets drive Commissioning 4474 en 2011 04 e...
Страница 14: ...Commissioning DYNEO Synchronous motors with permanent magnets drive 14 4474 en 2011 04 e LEROY SOMER...
Страница 15: ...15 Commissioning DYNEO Synchronous motors with permanent magnets drive 4474 en 2011 04 e LEROY SOMER...







































































