





























CS3E-E Series EtherCAT Closed Loop stepper drive User Manual
21
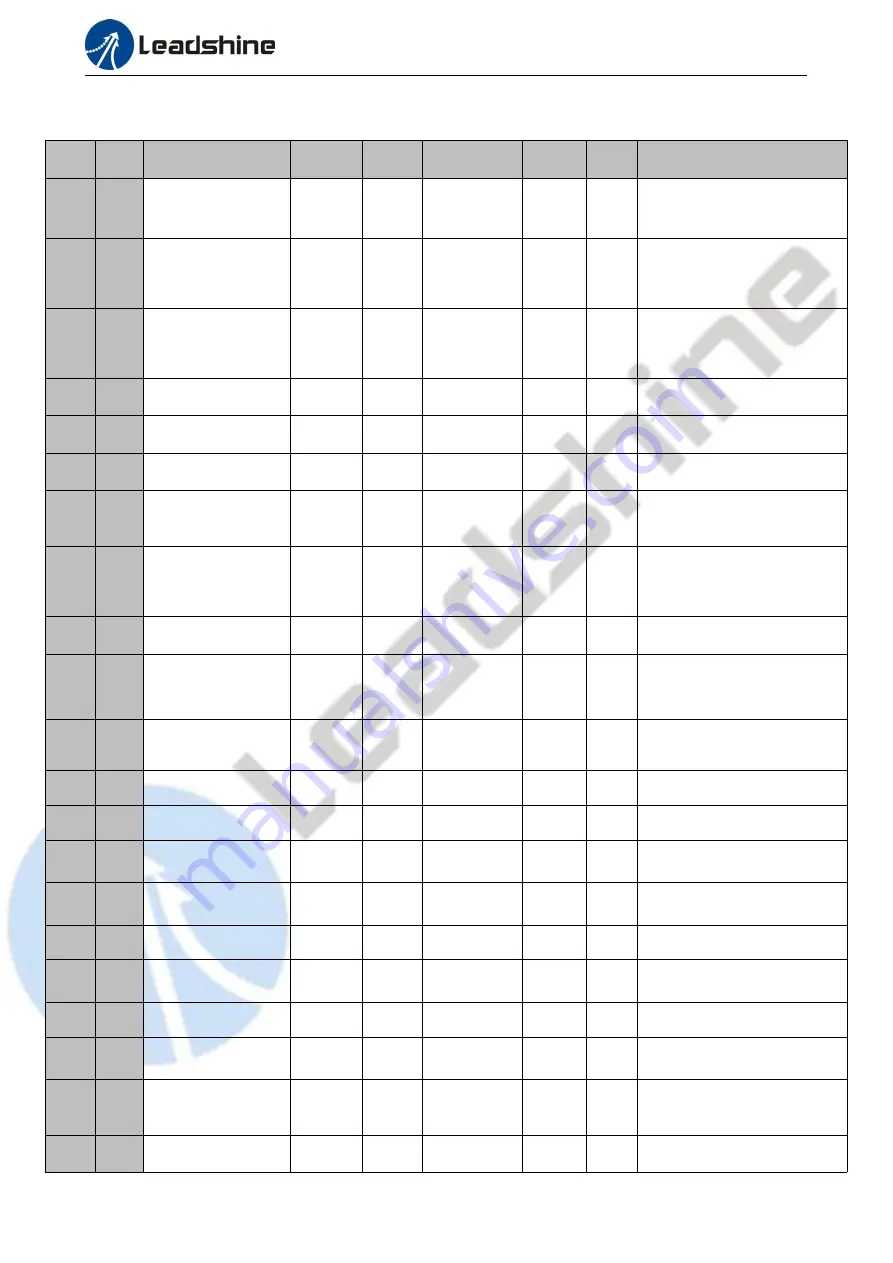
4.2 Manufacture Specific Object
Index
Sub-
index
Name
Access
Type
Range
Default
value
Unit
Remark
2000
00
Peak current
R/W/S
DINT
1-100
60
0.1A
Drive's max output current.
CS3E-D503E is 25 by default;
CS3E-D507E is 60 by default.
2001
00
Microstep resolution
R/W/S
DINT
200-51200
10000
Pulse
Required number of pulse to rotate
1 revolution of motor.
But it is recommended to modify
via 6092+01
2007
00
Action when disabled
R/W/S
UINT
0-1
0
-
0: Don't respond to commands,and
the motor shaft is not locked;
1: Don't respond to commands,but
the motor shaft is locked;
2010
01
Internal filtering time
R/W/S
UINT
0-32767
100
0.1ms
Internal
smoothing
time
for
control command.
2012
00
Soft-starting time
R/W/S
UINT
10-3000
1
ms
Internal
smoothing
time
for
starting current.
2013
00
Auto-tuning at power
on
R/W/S
UINT
0-2
1
--
1: Yes. 0: No
2019
01
In-position
pulse
compensation
R/W/S
UINT
0-1
1
--
0: With compensation, the value of
6064 = 607A in position;
1: Without compensation
2019
02
In-position mode
at
disabled state
R/W/S
UINT
0-1
0
--
0: Not allowed in-position signal
output when disabled;
1: Allowed in-position signal output
when disabled;
201A
01
Locking
current
percentage of power on
R/W/S
UINT
0-100
100
%
Usually keep the default value.
201A
02
Closed
loop
holding
current percentage
R/W/S
UINT
0-100
50
%
Multiply by the value of object
0x2000, the drive output current
will
change
between
these
according to the load.
201B
00
Locking duration time
R/W/S
UINT
0-1500
200
ms
Appropriately reduce this value if
you want to shorten the time of
locking shaft.
201C
00
Max time to close brake
R/W/S
UINT
100-10000
1000
ms
Usually keep the default value
201D
00
Zero speed point
R/W/S
UINT
0-500
10
0.1r/s
-
2024
00
Control Mode
R/W/S
UINT
0~10
2
--
0: Open Loop Control;
2: Closed Loop Control
2025
01
Speed point for open
loop switching closed
loop
R/W/S
UINT
0~200
18
0.1r/s
-
2025
02
Delay for open loop
switching closed loop
R/W/S
UINT
0~32767
12
ms
-
2025
03
Speed point for closed
loop switching open
loop
R/W/S
UINT
0~200
5
0.1r/s
-
2025
04
Delay for closed loop
switching open loop
R/W/S
UINT
0~32767
250
ms
-
2025
05
Feedback speed point
for closed loop
switching open loop
R/W/S
UINT
0~200
50
0.1r/s
-
2029
00
Encoder resolution
R/W/S
UINT
4000-20000
4000
Count
4 times the encoder resolution.
But it is recommended to modify
by 01
2030
00
Allowed max position
following error pulses
R/W/S
UINT
0~32767
4000
Count
4000 indicates the error of one
turn







































































