





























EM2RS Modbus RS485 Stepper Drive User Manual
- 36 -
Pr9.08
0x6208
PR path 1
---
Pr9.09
0x6209
Position
---
Pr9.10
0x620A
Position
---
Pr9.11
0x620B
velocity
---
Pr9.12
0x620C
Acc
---
Pr9.13
0x620D
Dec
---
Pr9.14
0x620E
Pause time
---
Pr9.15
0x620F
Special parameter
---
Pr9.16
0x6210
PR path 2
---
Pr9.17
0x6211
Position
---
Pr9.18
0x6212
Position
---
Pr9.19
0x6213
velocity
---
Pr9.20
0x6214
Acc
---
Pr9.21
0x6215
Dec
---
Pr9.22
0x6216
Pause time
---
Pr9.23
0x6217
Special parameter
---
Pr9.24- Pr9.31
Similar as above
paths
Similar as above
paths
PR path 3
Pr9.32- Pr9.39
Similar as above
paths
Similar as above
paths
PR path 4
Pr9.40- Pr9.47
Similar as above
paths
Similar as above
paths
PR path 5
Pr9.48- Pr9.55
Similar as above
paths
Similar as above
paths
PR path 6
Pr9.56- Pr9.63
Similar as above
paths
Similar as above
paths
PR path 7
Pr9.64- Pr9.71
Similar as above
paths
Similar as above
paths
PR path 8
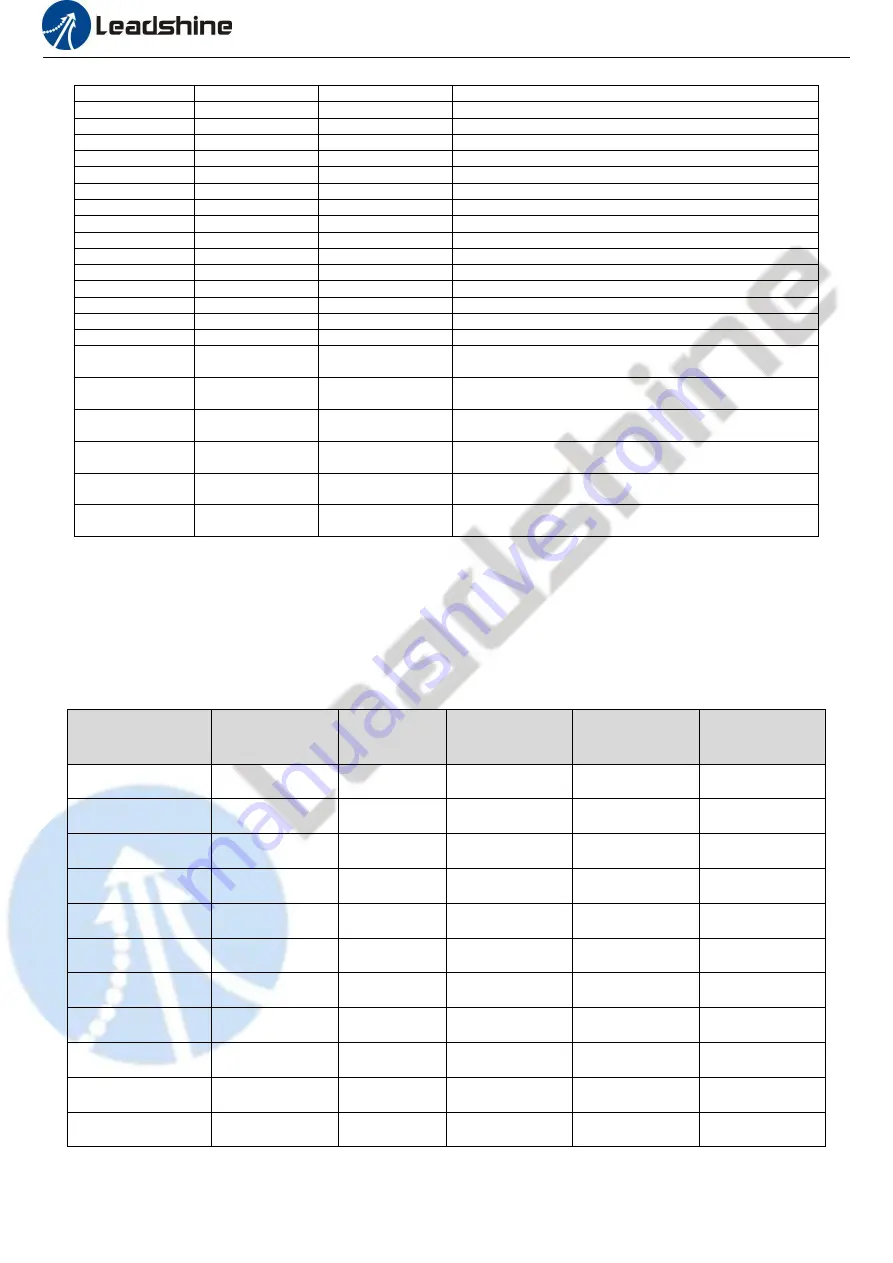
5.4.2 PR Path Configuration
If use the digital input ports to configure the PR path, they can be set to ADD0, ADD1, ADD2 and ADD3, thus forming 16-
segment PR path, and then trigger the path number to complete the PR motion.
Each digital input of the drive can be configured as any one of ADD0 - ADD3, then combine the path numbers, as shown in the
table below,
“on” means the digital input is configured as ADDx (x=1-3), and the input signal optocoupler on , “off “ means
signal input off.
PR path
SI1
(ADD0)
SI2
(ADD1)
SI3
(ADD2)
SI4
(ADD3)
SI5
(CTRG)
Path 0
off
off
off
off
on
Path 1
on
off
off
off
on
Path 2
off
on
off
off
on
Path 3
on
on
off
off
on
Path 4
off
off
on
off
on
Path 5
on
off
on
off
on
Path 6
off
on
on
off
on
Path 7
on
on
on
off
on
Path 8
off
off
off
on
on
Path 9
on
off
off
on
on
Path 10
off
on
off
on
on







































































