















DM422C Microstepping Driver Manual V1.0
Tel: +000 0000-00000000
1
1. Introduction, Features and Applications
Introduction
The DM422C is a versatility fully digital stepping Drive based on a DSP with advanced control
algorithm. The DM422C is the next generation of digital stepping motor controls. It brings a
unique level of system smoothness, providing optimum torque and nulls mid-range instability.
Motor self-test and parameter auto-setup technology offers optimum responses with different
motors and easy-to-use. The driven motors can run with much smaller noise, lower heating,
smoother movement than most of the Drives in the markets. Its unique features make the DM422C
an ideal solution for applications that require low-speed smoothness. Compared to the DM432C,
the DM422C has smaller size and lower cost.
Features
Anti-Resonance, provides optimum torque
and nulls mid-range instability
Motor self-test and parameter auto-setup
technology, offers optimum responses with
different motors
Multi-Stepping allows a low resolution step
input to produce a higher microstep output
for smooth system performance
Microstep resolutions programmable, from
full-step to 102,400 steps/rev
Supply voltage up to +36 VDC
Output current programmable, from 0.3A to
2.2A
Pulse input frequency up to 75 KHz
TTL compatible and optically isolated input
Automatic idle-current reduction
Suitable for 2-phase and 4-phase motors
Support PUL/DIR and CW/CCW modes
Over-voltage, over-current, phase-error
protections
Applications
Suitable for a wide range of stepping motors, from NEMA frame size 14 to 23. It can be used in
various kinds of machines, such as laser cutters, laser markers, high precision X-Y tables, labeling
machines, and so on. Its unique features make the DM422C an ideal solution for applications that
require low-speed smoothness.
DM422C Digital Stepping Driver Manual V1.0
Tel: +000 0000-00000000
2
2. Specifications
Electrical Specifications (T
j
= 25
℃
/77
℉
)
DM422C
Parameters
Min
Typical
Max
Unit
Output current
0.3
-
2.2 (1.6 RMS)
A
Supply voltage
+20
+24
+36
VDC
Logic signal current
7
10
16
mA
Pulse input frequency
0
-
75
kHz
Isolation resistance
500
M
Ω
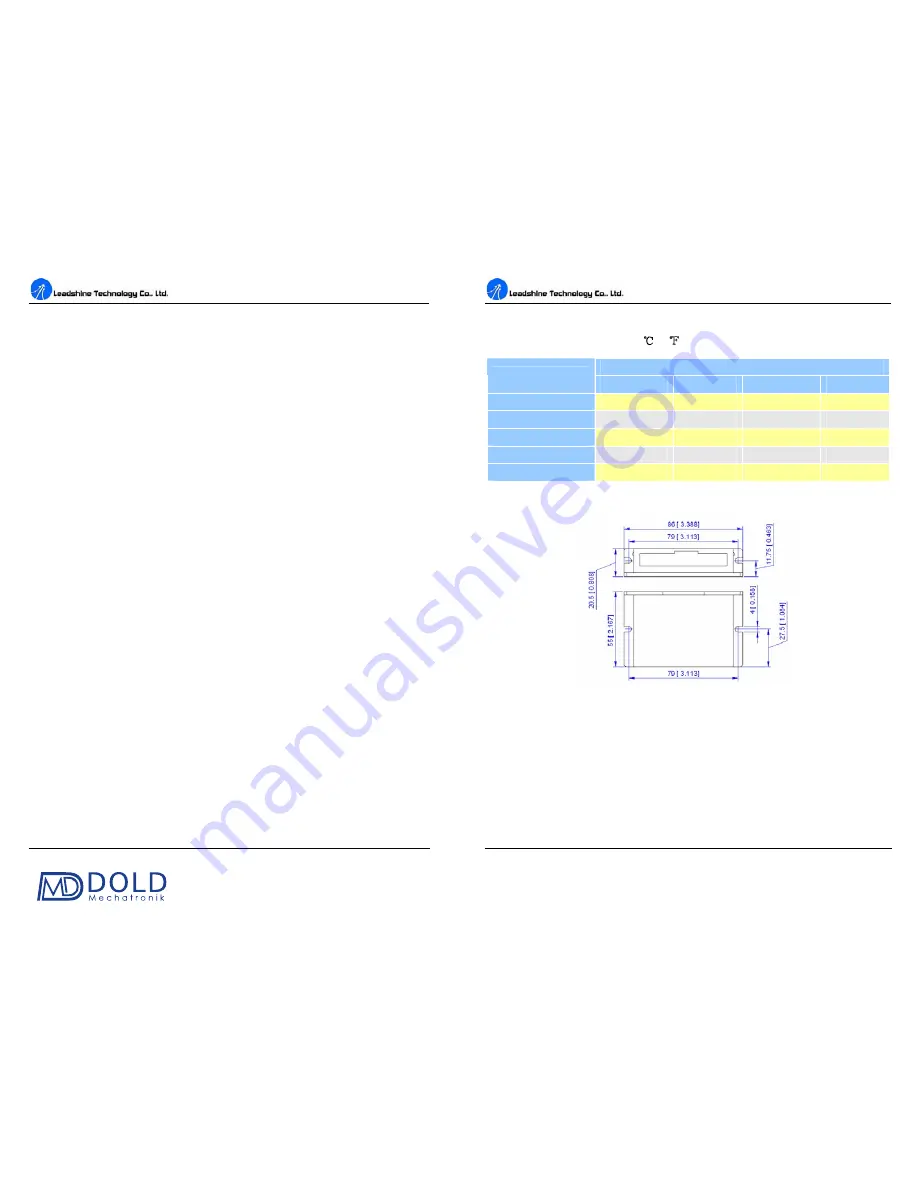
Mechanical Specifications (
unit: mm [inch]
)
Figure 1: Mechanical specifications
Elimination of Heat
Drive
’
s reliable working temperature should be <70
℃
(158
℉
), and motor working temperature
should be <80
℃
(176
℉
);
It is recommended to use automatic idle-current mode, namely current automatically reduce to
60% when motor stops, so as to reduce Drive heating and motor heating;
The Drive must be mounted vertically to maximize heat sink area as shown in the following
picture. Use forced cooling method to cool the system if necessary.
www.dold-mechatronik.de
DOLD Mechatronik
Sarach 10 – D-77790 Steinach
Telefon: +49 7832 / 9744670







































































