





























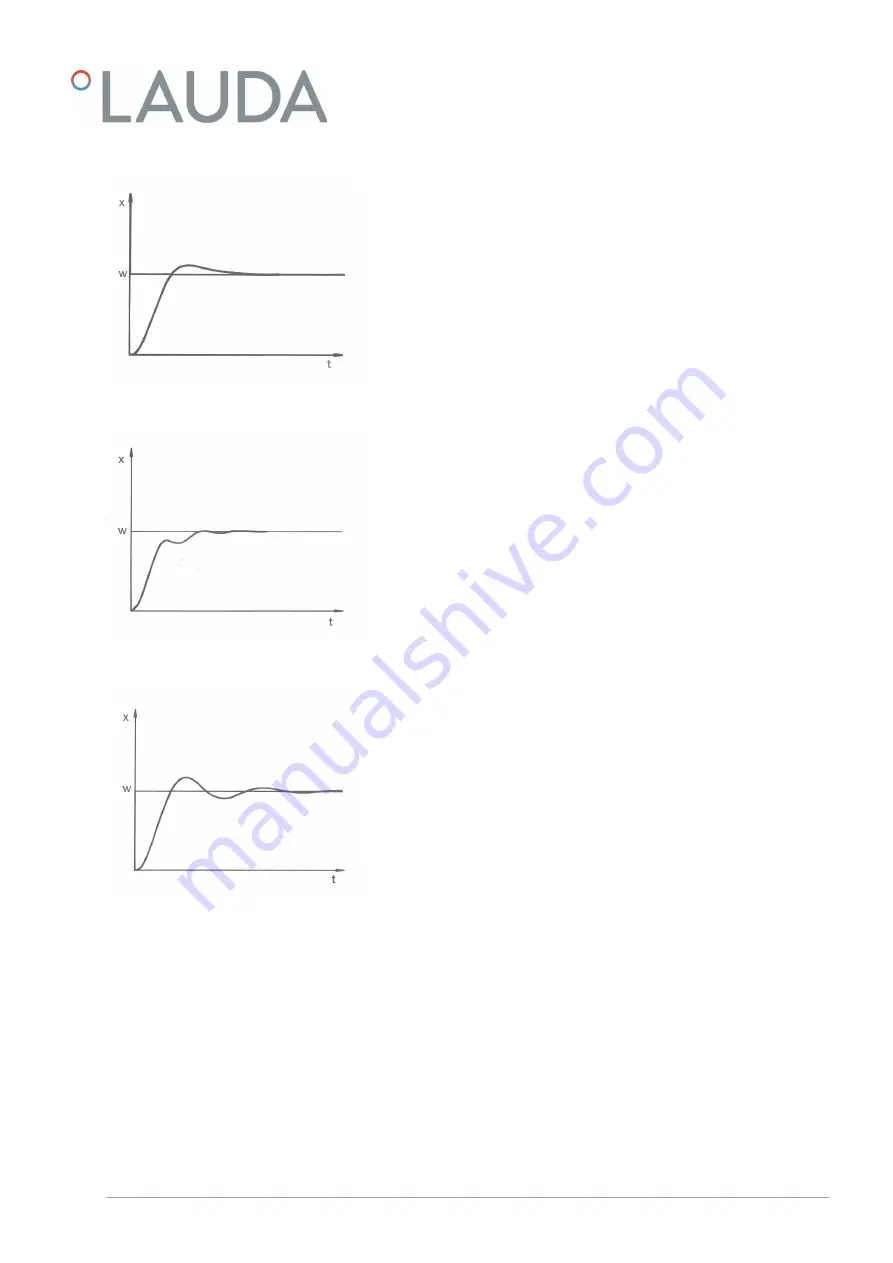
If the Xp parameter selected is too large, the actual value will reach the pro-
portional range early and the P-component will be less than 100 % of the
actuating signal. It takes longer to reach the target value and as a result, the
simultaneously integrated I-component has more time to establish its
actuating signal component. Once the target value is reached, the excessive
addition of the I-component causes the value to overshoot the target value.
If proportional range Xp is reduced, the P-component remains at 100 % for
longer. Consequently, the actual value approaches the target value more
quickly and the I-component has less time to integrate the system deviation.
The overshoot is reduced.
If the proportional range selected is too small, the P-component of the
actuating signal remains at 100 % for a long time. This value decreases even
faster within the proportional range, i.e. the actuating signal decreases rapidly
and the progress of the actual value towards the target value comes almost
to a complete stop. The I-component, which only becomes effective now,
causes the actual value to move slowly towards the target value.
In the case shown here, the preset I component is too large (parameter Tn
too small, Tn must be increased). The I-component integrates the control
deviation until it becomes 0. If integration proceeds too rapidly, the
actuating signal, i.e. the output signal of the controller, is too large. As a
result, the actual value fluctuates (fading) around the target value. The hold-
back time (parameter Tv) should be adapted using the formula:
Tv = Tn x 0.75.
Fig. 12: Control parameter Xp too large
Fig. 13: Control parameter Xp too small
Fig. 14: Control parameters Tn and Tv too
small
V3
LOOP
27 / 41
Содержание LOOP 100
Страница 21: ...5 2 LOOP menu structure Fig 10 Menu structure V3 LOOP 21 41...
Страница 42: ......
Страница 43: ......







































































