


























31
ECP5 and ECP5-5G sysCLOCK
PLL/DLL Design and Usage Guide
For Example:
PHASESEL[1:0]=2’b00 to select CLKOS for phase shift
PHASEDIR =1’b0 for selecting delayed (lagging) phase
Assume the output is divided by 2, CLKOS_DI
V
= 2
The CLKOS_FPHASE is set to 1
The above signals need to be stable for 5 ns before the falling edge of PHASESTEP and the minimum pulse width
of PHASESTEP should be four
V
CO clock cycles. It should also stay low for four
V
CO Clock Cycles.
For each toggling of PHASESTEP, you will get [1/(8*2)]*360 = 22.5 degree phase shift (delayed).
Divider Phase Shift
Once the PHASESEL and PHASEDIR have been set a post-divider phase adjustment is made by toggling the
PHASELOADREG signal. Each pulse of the PHASELOADREG signal will generate a phase shift. The step size
relative to the unshifted output is specified by this equation:
[(CLKO<n>_CPHASE – CLKO<n>_DIV)/( CLKO<n>_DIV + 1)] * 360
o
Where <n> is the clock output specified by PHASESEL (CLKOP/OS/OS2/OS3).
V
alues for CLKO<n>_CPHASE
and CLKO<n>_DI
V
are located in the HDL source file. Please note that if these values are both “1”, no shift will be
made.
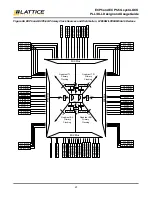
Figure 28. Divider Phase Shift Timing Diagram
*Note – Minimum Time Before Shifting Again Equation =
2.5*(CLKO<n>_DI
V
+ 1) + (CLKO<n>_1) ] * (Period of Divider Clock).
CLKOP
PHASELOADREG
CLKOS
Shifted Phase
Minim
u
m 5 ns
Set
u
p Time
Minim
u
m P
u
lse
W
idth of 10 ns
PHASESEL
[1 :0 ]
Minim
u
m Time Before
Shifting Again *
PHASEDIR
“ 01”







































































