


























57
Trim Adjustment Points
Adjust one side completely and then use that as the standard when adjust-
ing the opposite side.
KXR-L4T
KXR-L4R
Align the leg servos so that when looked at from the side their output
shafts are lined up in a straight line.
15.
If the robot slowly and automatically moves to the set position after restarting, the Trim Adjust-
ment is completed.
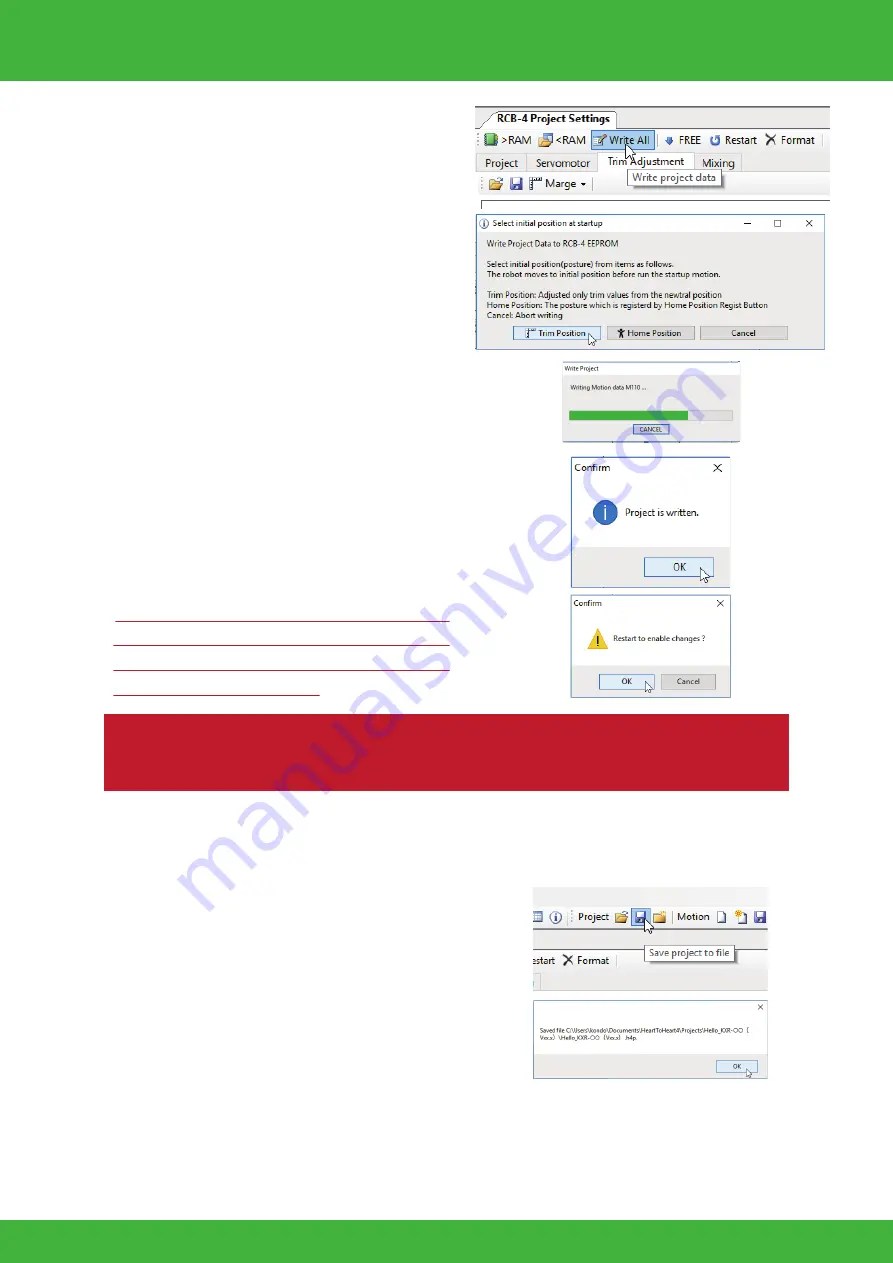
13.
The “Set Initial Posture at Start-up" dialog
appears. Select the “Trim Position". Writing
of the data to RCB-4 begins.
16.
Save the Project before quitting the soft-
ware.Press the "Save Project" button in the
toolbar of the Main Window.
12.
When all the Trim Adjustments are complet-
ed, press the "Save All to ROM" button in the
Project Setting window.
14.
When the data writing is completed, a confir-
mation dialog asking "Do you want to restart
your computer to reflect the changes made?"
will appear; press "OK".
*PC, HTH4 will not restart.
When restarting, all of the robot servos
will relax. To prevent the robot from fall-
ing, make sure to support the head or
backpack while restarting.
17.
When the saving is completed, the following
dialog appears so press "OK".
Next, run the sample motion.
If the process is interrupted, turn the power off on the robot and
disconnect the battery.
*If you close the application without saving, the project will not be saved.
*The home position may differ with the project.
Rover Type: At restart turn the wheels about 1.5sec.
Keep the body with wheels floating.
Trim Adjustment 5







































































