





























Honeywell
Parameter Descriptions
65
10
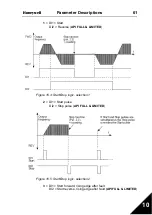
Figure 10.8: DC-braking time when Stop mode = Coasting
Par. 2.3 = 1 (Stop function = Ramp):
After the Stop command, the speed of the motor is reduced according to the
set deceleration parameters, if the inertia of of the motor and load allows that,
to the speed defined with parameter 4.6, where the DC-braking starts.
The braking time is defined with parameter 4.7. See Figure 10.9.
Figure 10.9: DC-braking time when Stop mode = Ramp
fn
fn
t
t
t = 1 x par. 4.7
t = 0,1 x par. 4.7
0,1 x fn
RUN
STOP
RUN
STOP
Output frequency
Motor speed
Output frequency
Motor speed
DC-braking ON
DC-braking ON
fout
fout
t = par. 4.7
t
Par. 4.6
Motor speed
Output frequency
DC-braking
RUN
STOP
fout







































































