





























Honeywell
Parameter Descriptions
57
10
1.10
F
IELD
WEAKENING
POINT
The field weakening point is the output frequency at which the output voltage
reaches the value set with par. 1.11.
1.11
V
OLTAGE
AT
FIELD
WEAKENING
POINT
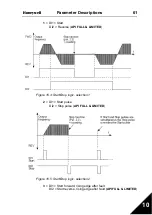
Above the frequency at the field weakening point, the output voltage remains
at the value set with this parameter. Below the frequency at the field weaken-
ing point, the output voltage depends on the setting of the U/f curve parame-
ters. See parameters 1.9 - 1.14 and Figures 10.1 and 10.2.
When the parameters 1.1 and 1.2 (nominal voltage and nominal frequency of
the motor) are set, the parameters 1.10 and 1.11 are automatically given the
corresponding values. If you need different values for the field weakening point
and the voltage, change these parameters after setting the parameters 1.1
and 1.2.
1.12
U/
F
CURVE
,
MIDDLE
POINT
FREQUENCY
If the programmable U/f curve has been selected with the parameter 1.9, this
parameter defines the middle point frequency of the curve. See Figure 10.2.
1.13
U/
F
CURVE
,
MIDDLE
POINT
VOLTAGE
If the programmable U/f curve has been selected with the parameter 1.9, this
parameter defines the middle point voltage of the curve. See Figure 10.2.
1.14
O
UTPUT
VOLTAGE
AT
ZERO
FREQUENCY
This parameter defines the zero frequency voltage of the curve. See Figures
10.1 and 10.2.
1.15
T
ORQUE
BOOST
The voltage to the motor changes automatically with high load torque which
makes the motor produce sufficient torque to start and run at low frequencies.
The voltage increase depends on the motor type and power. Automatic torque
boost can be used in applications with high load torque, e.g. in conveyors.
0
= Disabled
1
= Enabled
Note:
In high torque - low speed applications - it is likely that the motor will
overheat. If the motor has to run a prolonged time under these conditions, spe-
cial attention must be paid to cooling the motor. Use external cooling for the
motor if the temperature tends to rise too high.
Note:
The best performance can be reached by running motor identification,
see par. 1.18.







































































