















MSXX10, MSXX20 SERIES
63-2607—26
4
Design Life (at Rated Voltage):
a
Two-position models: 50,000 full stroke cycles;
50,000 full stroke spring returns.
Floating and Modulating models: 60,000 full stroke cycles;
1,500,000 repositions.
Input Impedance:
95K ohms minimum.
Feedback Signal:
0/2-10 Vdc;
Driving current is 3 mA minimum.
Torque Ratings:
Typical Holding, Driving, Spring Return:
MSXX10: 88 lb-in. (10 Nm).
MSXX20: 175 lb-in. (20 Nm).
Stall Maximum (fully open at 75°F):
MSXX10: 175 lb-in (20 Nm)
MSXX20: 350 lb-in. (39.6 Nm).
Noise Rating at 1m (Maximum):
Holding: 20 dBA (no audible noise).
Two-position models:
Driving: 50 dBA.
Spring Return: 65 dBA.
Floating/Modulating models:
Driving: 40 dBA.
Spring Return: 50 dBA.
Sylk Enabled models:
Driving: < 50 dBA
Spring Return: < 60 dBA
Vibration:
Not suitable for high vibration applications (Example
installation environment: Truck Trailers or Railroad Cars)
Acceptable Vibration Levels 0.6g at 30 to 300 Hz.
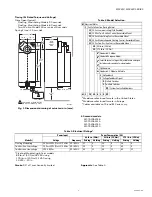
Table 4. Approvals.
Environmental Protection Ratings:
NEMA2 (US Models) or IP54 (European Models) when
mounted on a horizontal shaft with access cover below
the shaft.
Safety:
Protection Class IP54
Overvoltage Category II
Accessories:
27518 Balljoint (5/16 in.).
103598 Balljoint (1/4 in.).
205860 Electronic Minimum Position Potentiometer.
27520A-E,G,H-L,Q Pushrod (5/16 in. diameter).
32000085-001 Water-tight Cable Gland/Strain-relief Fit-
ting (10 pack).
32003036-001 Weather Enclosure.
32004254-002 Self-Centering Shaft Adapter (supplied
with actuator).
50001194-001 Foot Mount Kit.
50005859-001 NEMA4/4X Enclosure.
50006427-001 Anti-Rotation Bracket (supplied with actu-
ator).
SW2-US Auxiliary Switch Package.
See also Form 63-2620.
Sylk™ Bus:
Sylk is a two-wire, polarity insensitive bus that provides
communications between a Sylk-enabled actuator and a
Sylk-enabled controller. For wiring, the Sylk-enabled
actuator may be mounted up to 200 ft. (61m) from the
controller; twisted pair wire is recommended for wire
runs longer than 100 ft. (30.5m). Using Sylk-enabled
actuators saves I/O on the controller and is faster and
cheaper to install since the bus is polarity insensitive.
Sizing
Required Torque
In lieu of data from a Specification Engineer or
Manufacturer, required torque for a given damper load can
be determined using the following method:
Where:
— T
R
= Required torque for the damper load.
— T
D
= Damper torque rating from the manufacturer,
expressed in either (lb-in.)/(sq ft) or (Nm)/(sq m). the
damper load.
— A
D
= Damper area expressed in either sq ft or sq m.
Actuators Required
In lieu of data from a Specification Engineer or
Manufacturer, the number of required actuators for a given
damper load can be determined using the following
method:
Where:
— N = Number of actuators.
— T
R
= Required torque for the damper load. (See above.)
— T
A
= Actuator torque rating.
— SF = Safety factor.
NOTE:
The safety factor accounts for variables such as
misalignments, aging of the damper, etc. 0.8 is a
typical safety factor.
a
Floating/Modulating 60 sec models
20,000 full stroke cycles
100,000 repositions
MS31XX,
MS41XX,
MS75XX,
MS81XX
,
MS7110,
MS7106
,
UL/cUL
X
X
UL2043 Plenum Rating,
File No. E4436; Guide No.
XAPX.
X
X
T
R
T
D
A
D
×
=
N
T
R
T
A
SF
×
-------------------
=







































































