





























Drive User Guide
32
mode has been switched to profile velocity mode.
B. Confirm the content of 0x6061 object has been set to 9. It indicates that the operational
mode has been switched to the cyclic synchronization velocity mode.
(4)
Set up the maximum limit value of moving velocity (0x607F), the maximum limited value of
acceleration/deceleration (0x6083
、
0x6084) and the deceleration value of emergency stop
(0x6085). These units are count base.
(5)
Master station transmits target velocity (0x60FF). The unit is count/s. Motor will operate to the
target velocity.
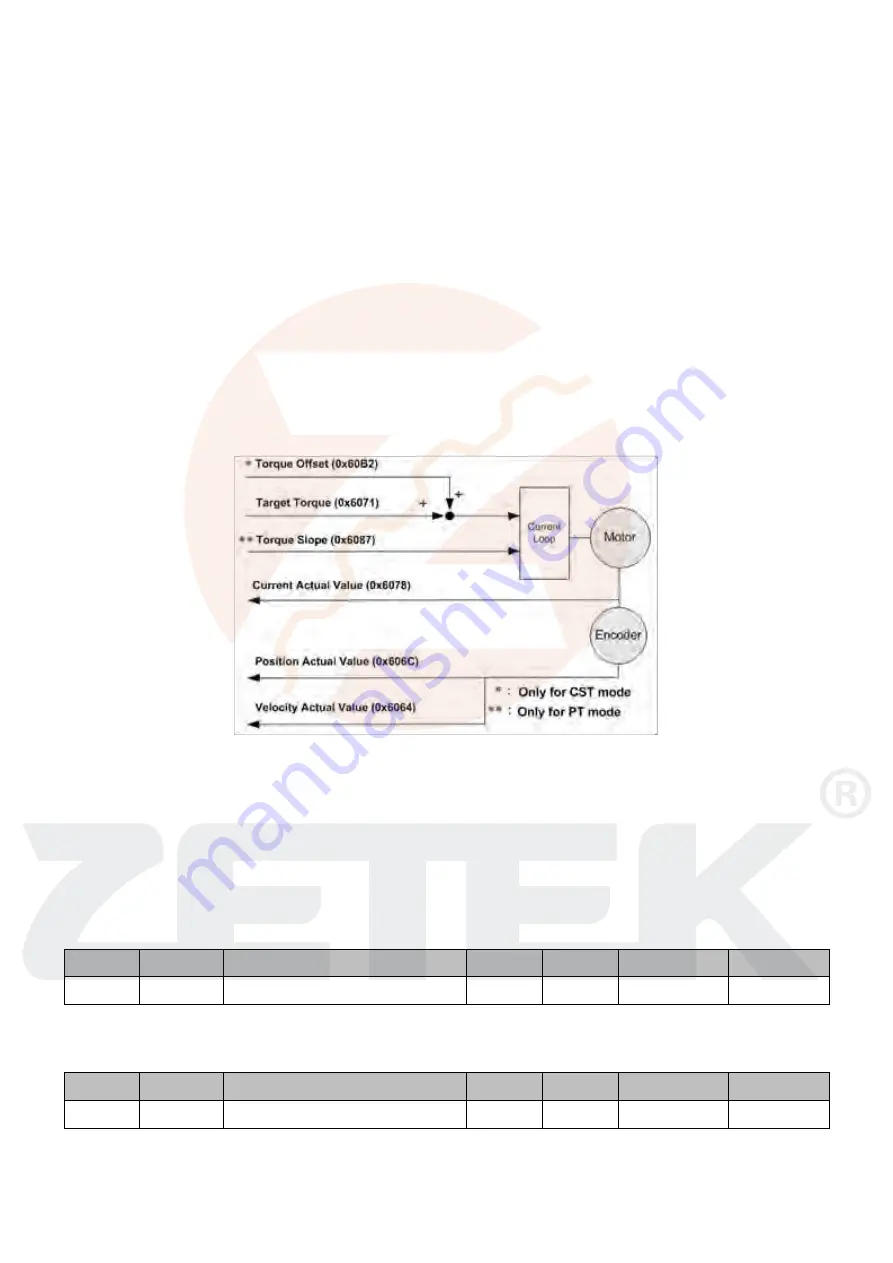
9.3 Torque Control Mode
The figure shown below is the control schematic diagram of profile torque mode (PT) and cyclic
synchronization torque mode (CST). Operating under this mode, drive involves the current loop and
accepts with the target current command transmitted from the master station.
The objects used by the profile torque mode and cyclic synchronization torque mode are listed as
follows:
Target torque (0x6071): The input of target torque is based on the per millage form of motor
continuous current transmitting to the drive. Range is 1000~1000 and the unit is 0.1% of motor
continuous current. Default value is 0. It indicates that the pre-setting current command is 0% of motor
continuous current.
Index
Sub-index
Name
Type
Access
Value
PDO mapping
0x6071
0x00
Current Command (Target Torque)
INT16
RW
-1000~1000
O
Torque slope (0x6087): This is the slope of current command under the set up profile torque mode.
The unit is 0.1%/sec variation of continuous current command and the default value is 1000.
Index
Sub-index
Name
Type
Access
Value
PDO mapping
0x6087
0x00
Current Slope
UINT32
RW
0~4294967295
O
www.servosystem.ru +7(495) 407-01-02







































































