



























119
Programming example: model helicopter
Tip:
Always try to manage with these three reference points
initially, as additional points just complicate matters,
and extra complexity is just what you don’t need at the
moment.
The reference point for hovering should generally be the
mechanical centre-point of the collective pitch stick, as
this position feels completely natural to most pilots. You
can, of course, set up the curve to locate the hover at a
different point, but you should not be tempted to do this
unless you know exactly what you are doing. Start by
setting the collective pitch stick to centre. Assuming that
you previously adjusted the servos in accordance with
the manufacturer’s instructions, the servo output arms
will now (usually) be at right-angles to the servo case.
If you have not already done so, adjust the mechani-
cal linkages to the rotor head so that all the blades are
set to a collective pitch angle of 4° to 5° positive for the
hover. All known helicopters will fl y at this approximate
setting.
Now push the collective pitch stick fully forward to the
maximum collective pitch point (the full-length vertical
line indicates the current position of the stick.) Adjust
Point 5 on the collective pitch curve using the rotary
cylinder, with the aim of producing a maximum collective
pitch setting of around 9° at the main rotor blades. This
point should be at a value of 50%.
Note:
A rotor blade set-up gauge, e. g. the GRAUPNER item,
Order No.
61
, is very useful when setting up blade pitch
angles, as you can read off the angles directly.
Now pull the collective pitch stick right back to the col-
lective pitch minimum position. Set the blade pitch angle
for Point 1 to 0 to -4°, depending on your piloting ability.
This produces a slightly angled line at the hover point,
forming what is known as the collective pitch curve. It
might look approximately like this:
ptch
input
output
point
5
100%
80%
80%
+
+
+
If you now switch to the auto-rotation phase – you will
see the name of the fl ight phase “Autorot” at the bottom
of the screen – the “old” collective pitch curve will re-ap-
pear. In this phase you should set the same values as in
the normal phase, with the following exception: increase
the pitch angle at Point 5 (collective pitch maximum) by
about 2°. This gives slightly more pitch for fl aring the
model when practising “autos” at a later (!) date.
Once you have set up the collective pitch curve, operate
the auto-rotation switch again, then press
ESC
to return
to the helicopter mixer menu select point. Now we move
on to the “ch1
¼
throttle” line, where you can set up the
throttle curve.
The fi rst step here is to enter the idle trim range by
adjusting the throttle curve. Move the collective pitch
stick to the minimum position, and set Point 1 to a value
of around 65%.
input
output
point
3
100%
65%
65%
ch1
thro
With the throttle limiter
closed
and the idle trim fully
open, pull the collective pitch stick to the “fully back”
position and move it slightly to and fro: the throttle servo
should not respond to this movement. This arrangement
gives you a seamless transition from idle trim to the
throttle curve. You will probably need to make further ad-
justments to the throttle curve, but this must be carried
out later as part of the fl ight-testing process.
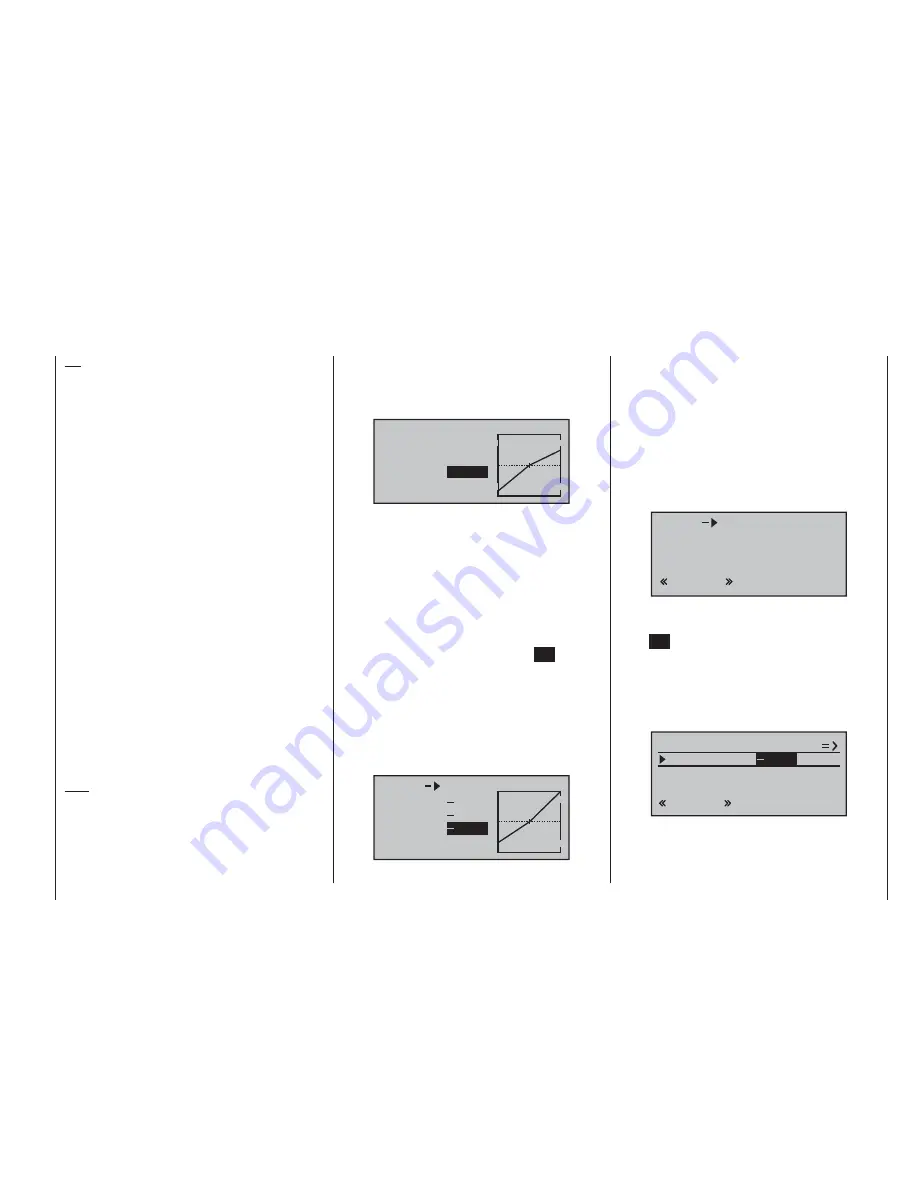
If you now switch temporarily from this graph to the
auto-rotation fl ight phase, you will see – instead of the
usual display – the following:
ch1
thro
off
Autorot
This means that the throttle servo has switched to a
fi xed value, which can be adjusted as follows:
Press
ESC
to return to the menu list. Assuming that you
are still in the auto-rotation phase, this will now include
new sub-menus.
The important line is “Throttle”, where you should set
a value of 125% or -125%, depending on the
direction of servo rotation.
ptch
thro
tail
Autorot
gyro
0%
SEL
125%
0%
This setting ensures that the motor stops reliably in
the auto-rotation phase (to allow you to cope with an
emergency). Later, when you have gained suffi cient
experience to practise auto-rotation landings, the setting
Содержание mx-16 ifs
Страница 1: ...mx 16 Programming Manual mx 16iFS 1 gb 3D CYLINDER ROTARY SELECT INTELLIGENT FREQUENCY SELECT...
Страница 15: ...15 For your notes...
Страница 31: ...31 For your notes...
Страница 35: ...35 For your notes...
Страница 39: ...39 For your notes...
Страница 55: ...55 For your notes...
Страница 65: ...65 For your notes...
Страница 77: ...77 For your notes...
Страница 104: ...104 For your notes...
Страница 111: ...111 For your notes...
Страница 128: ...128 For your notes 128...
Страница 129: ...129 For your notes 129...
Страница 130: ...130 For your notes...







































































