




























LIN Frames and Signals
Designer Reference Manual
DRM047 — Rev 0
108
LIN Frames and Signals
MOTOROLA
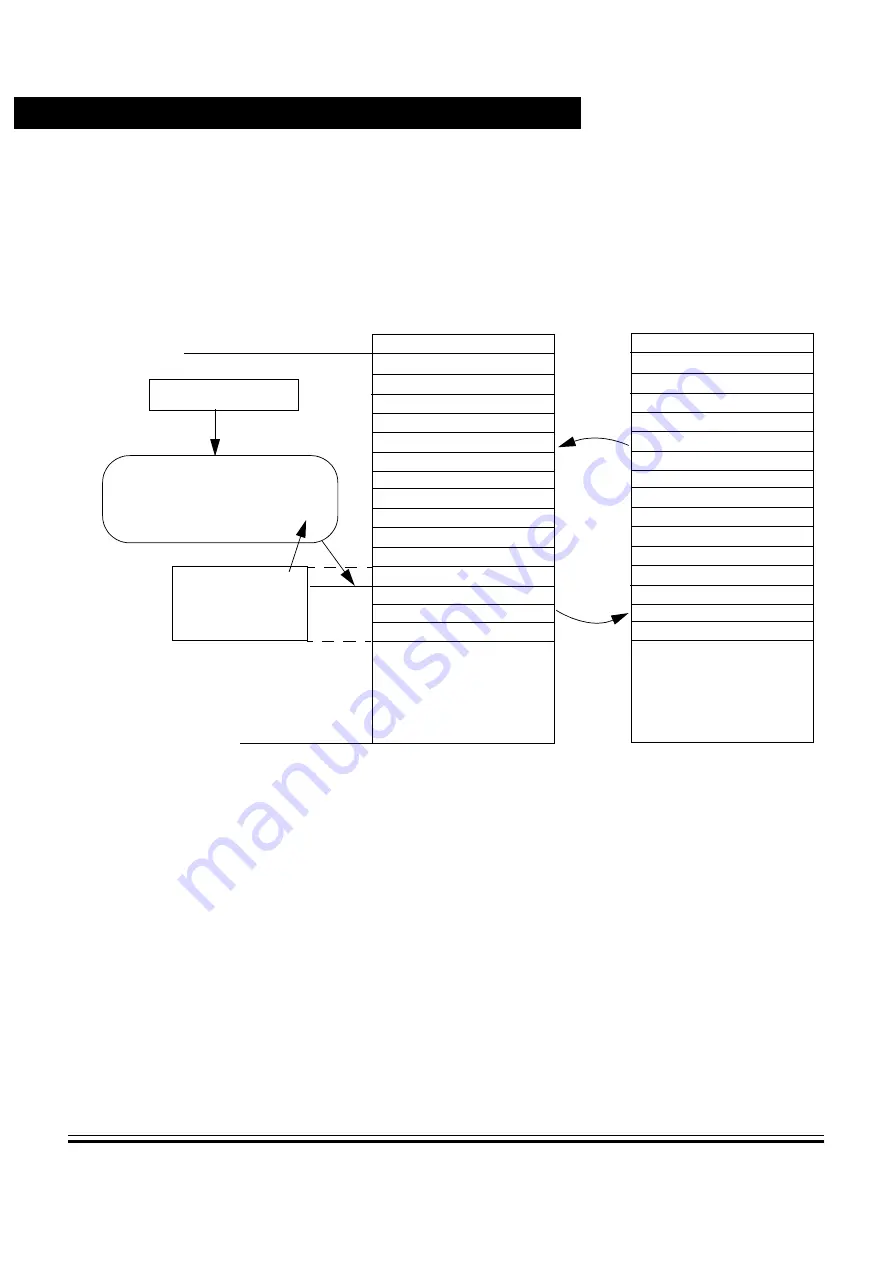
Request and Slave response frames. The parameters space of these
data signals is addressed the parameters RAM according to paramArray
pointer.
Figure C-1. Configuration Parameters Addressing
C.4 Possible Software Extension Programming via LIN
The principle of the parameters configuration could be possibly
enhanced via LIN-bus software programming. The software FLASH
memory could be split into two segments.
•
resident software segment with LIN driver
•
re-programmable software segment
l_u8_rd_paramAray
paramRAM
BASE_ADDR_PA0
effective address =
BASE_ADDR_PA
paramAray * 4+
X
AppConfiByte1
currentBlockRun
RESERVED
frequencyStart
acceleration
periodStopTimeoutL
periodStopTimeoutH
positionStallL
positionStallH
positionResetReqL
positionResetReqH
positionParkL
positionParkH
positionCorrectionL
positionCorrectionH
nodeID
possible extension
BASE_ADDR_PA127
AppConfiByte1
currentBlockRun
RESERVED
frequencyStart
acceleration
periodStopTimeoutL
periodStopTimeoutH
positionStallL
positionStallH
positionResetReqL
positionResetReqH
positionParkL
positionParkH
positionCorrectionL
positionCorrectionH
nodeID
possible extension
paramROM
MCU
Store
Reset
(FLASH)
l_u8_rd_data
0
l_u8_rd_data
1
l_u8_rd_data
2
l_u8_rd_data
3
F
re
e
sc
a
le
S
e
m
ic
o
n
d
u
c
to
r,
I
Freescale Semiconductor, Inc.
For More Information On This Product,
Go to: www.freescale.com
n
c
.
..







































































