






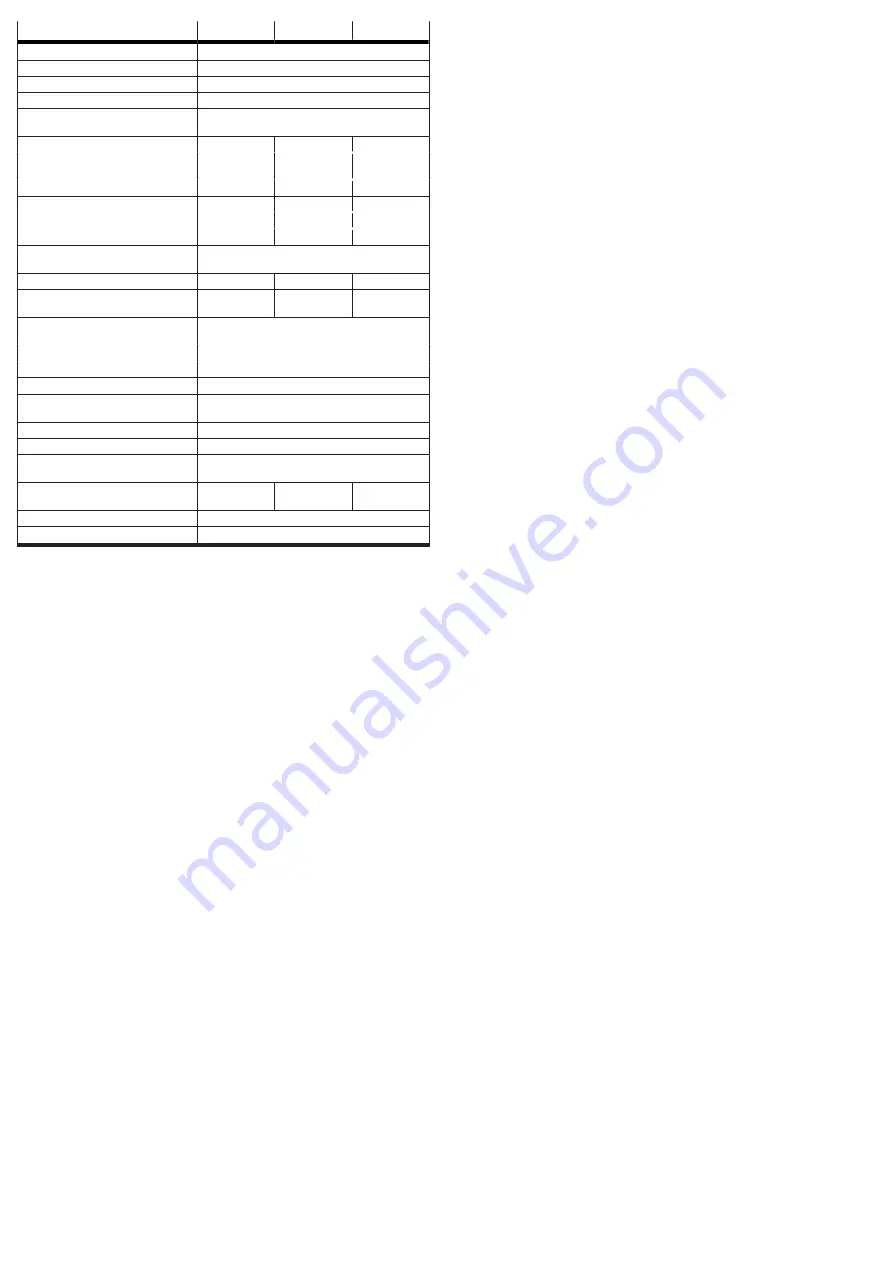
Size
32
45
60
Mounting position
any
Ambient temperature
[°C]
0 … +50
Storage temperature
[°C]
–20 … +60
Degree of protection
IP40
EMCS-ST: Certificates, decla-
ration of conformity
Max. payload
–
horizontal mounting posi-
tion
[kg]
2
6
10
–
vertical mounting position [kg]
2
6
10
Max. velocity
1)
–
with axial kit
[mm/s]
190
250
240
–
with parallel kit
[mm/s]
190
235
205
Velocity "Speed Press/
Speed Ref"
2)
[mm/s]
10
Max. feed force
3)4)
[N]
60
120
250
Max. force on external stops
during homing
5)
[N]
92
190
385
Max. acceleration/decelera-
tion
2)
–
with axial kit
[m/s
2
]
5
–
with parallel kit
[m/s
2
]
3
Duty cycle
[%]
100 (+30 … +50 °C: – 2% per Kelvin)
Distance between stop and
end position
6)
[mm]
1
Repetition accuracy
[mm]
±0.015
Nominal voltage
[V DC]
24
Logic current consumption
(logic, pin 1)
[mA]
DIO operation: 100 ... 300
IO-Link operation: 100 ... 150
Load current consumption
(power, pin 1)
[A]
3
3
5.3
IO-Link port class
A
IO-Link protocol version
Device V 1.1
1) Maximum value for Speed In/Speed Out at level 10
2) Unchangeable parameter.
3) Maximum value for Force at level 10
4) Force is controlled and evaluated by closed-loop control of the motor current. Depending on the mecha-
nism of the drive, a linear force can be calculated from the measured level of current. The target is set as a
percentage of the rated motor current and may deviate from the actual force on the mini slide. At the lower
force levels the frictional force of the drive system may be greater than the set feed force and may result in
the drive system coming to a standstill.
5) The force acts on the stop for
£
100 ms
6) Distance (MechIn – LimIn or MechOut – LimOut)
Tab. 8: Technical data EGSS-BS







































































