













Copyright 2023 EAI All Rights Reserved
10 / 12
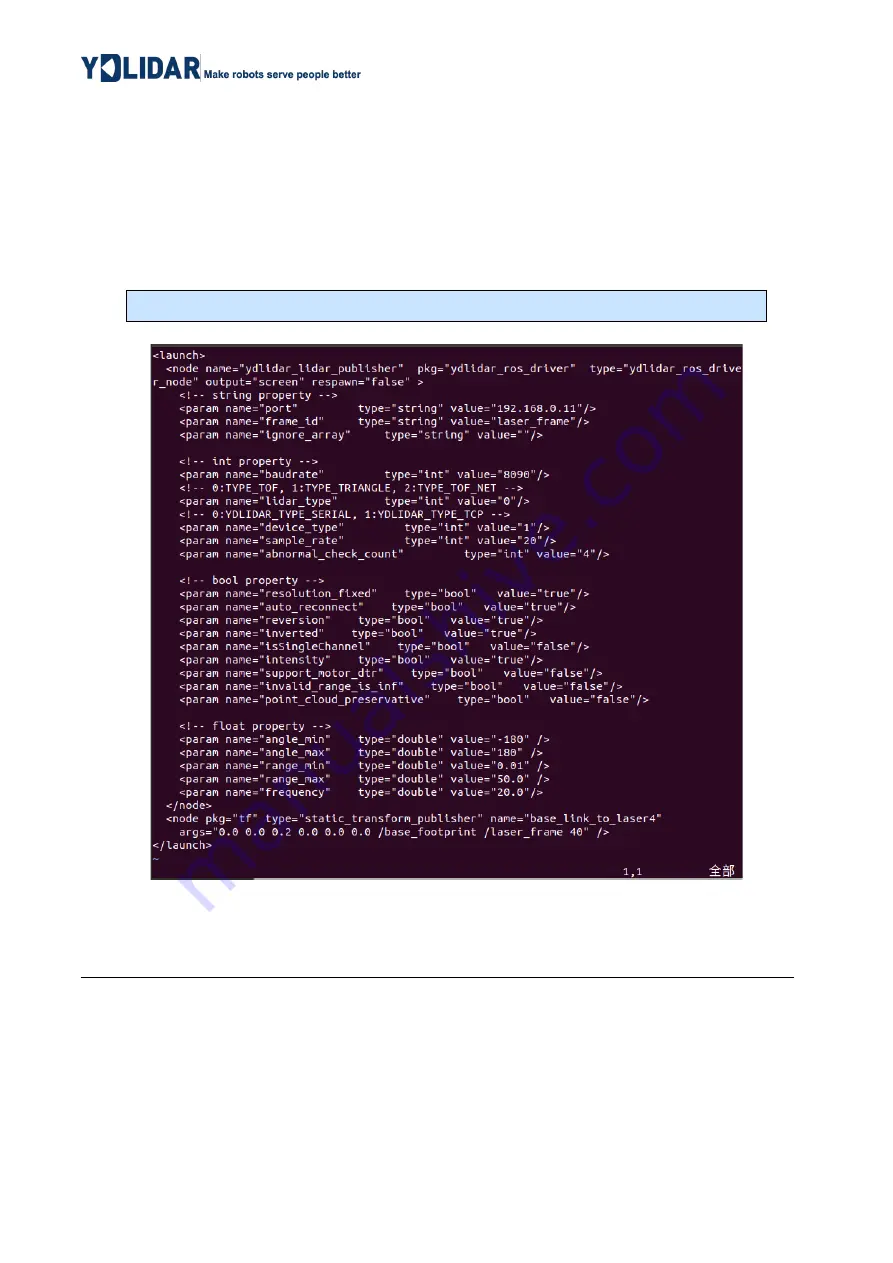
2.6
Modify Scan Angle
The scanning data seen by running the launch file is displayed by default with 360- degree data.
To modify the display range, you need to modify the configuration parameters in the launch file. The
specific operation is as follows:
1)
Go to the directory where the corresponding [launch file] is located and edit the file, as shown in
the figure:
FIG 17
TEA .LAUNCH FILE
Note: For more information about the file contents, please refer to
https://github.com/YDLIDAR/ydlidar_ros_driver#configure-ydlidar_ros_driver-internal-parameter
2)
The TEA lidar coordinates follow the right-hand rule within ROS, with an angle range of [-180,
180]. "angle_min" is the start angle, and "angle_max" is the endangle. The specific scope needs
to be modified according to actual use.
$ vim TEA.launch
Содержание YDLIDAR TEA
Страница 1: ...Shenzhen EAI Technology Co Ltd DOC 01 13 005502 www ydlidar com YDLIDARTEA USERMANUALALPHA...
Страница 13: ...Copyright 2023 EAI All Rights Reserved 11 12 FIG 18 YDLIDAR TG COORDINATES DEFINITION...
Страница 14: ...Copyright 2023 EAI All Rights Reserved 12 12 3 Revise Date Version Content 2023 08 10 0 1 0 The 1st release...