












Copyright 2013 Eagle Tree Systems, LLC Page 6
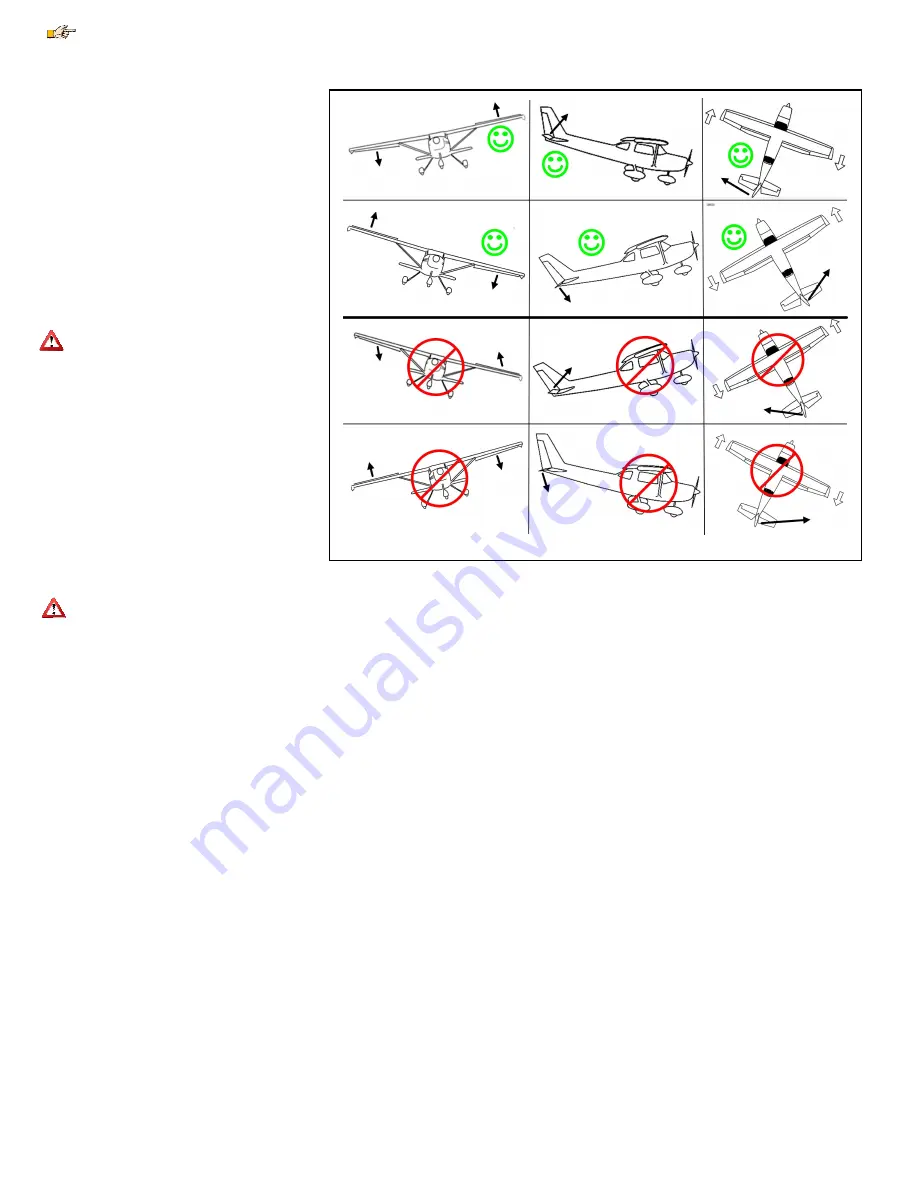
Figure 6 – Correct and Incorrect Control Surface Movement
If permanently mounting the Guardian, ensure that the USB port is still accessible for PC configuration and firmware update.
Preflight Checks
Before every flight, it is strongly recommended that you
perform the following steps:
•
Perform your normal preflight check. Ensure your
servos respond correctly to your RC control stick
commands.
•
To test that the Guardian is working, hold the
airplane level. Now, pitch, roll and yaw the
model. Please see Figure 6. You should see the
control surfaces deflecting appropriately to level
the airplane and keep it on a straight heading. If
the control surfaces do not move at all, ensure that
the Master Gain knob on your transmitter (if used)
is set so that stabilization will occur, and ensure
that the Mode/Config switch (if used) is set for
either 2D or 3D Mode.
If any of your control surfaces are moving the
wrong direction, you need to reverse the
direction of the appropriate Guardian Gain Control
Dial!
First Flight
To account for trims and mounting errors of the
Guardian within your plane, follow the instructions in
the section titled “Reset Level Flight and Trims.”
On your first flight, it is recommended that you do an
unpowered hand-toss of your airplane, if it is capable of
hand-toss launches. If the airplane safely glides to the
ground with little or no input, then your configuration is
correct. If the model oscillates or overcompensates
during the hand-toss, your Gain is too high.
Once it has been shown that the Guardian has been correctly configured, perform a run-up on the ground with stabilization enabled, while watching your control surfaces for
drift. If it appears as if stabilization is working properly with the engine active, then throttle down, perform one last preflight check and take off with power.
Don’t fly your model if your control surfaces are moving unexpectedly during engine run-up!
Once in the air and only when safe, release the control stick so it sits at zero deflection with 2D Mode enabled. Your airplane should fly straight and level. If not, your
Guardian may be mounted improperly or you need to re-trim your airframe. Disable stabilization by flipping the Mode/Config switch to the center position (if available).
Trim your controller in this mode until the plane achieves level flight. Land and follow the instructions for “Resetting Trims” on the ground.
Tuning Stabilization Gains
Stabilization Theory
The Guardian 2D/3D Stabilizer uses accelerometers and gyroscopes to measure the orientation of your model relative to the local direction of Earth’s gravity. In addition, it
interprets Pitch and Roll attitudes commanded by your Elevator and Aileron stick movements, respectively.
With this information, it is able to determine the error between your requested flight attitude and your plane’s true orientation. By passing this error through a controller
algorithm and sending it as servo commands through its Elevator, Aileron and Rudder outputs, the Guardian can help turn your squirrely model into a smooth-flying wing
on rails!
Each axis has a separate gain control dial, which is used to adjust gain on that axis. The Pitch, Roll and Yaw gains are then scaled by the optional Overall “Master Gain”
control, which can be mapped to a knob (or slider) on your transmitter. This arrangement allows individual axis gain adjustment while also providing in-flight Overall Gain
adjustment to compensate for varying conditions and aerodynamic performance.
In general, the higher the gain, the more responsive and resilient your plane will be to disturbances such as wind, balance and trim issues. Tuning the gains too high
however may result in oscillations of the airframe. It is recommended that the Master Gain control be used to tune the airframe until it barely oscillates and then be turned
back down. This will ensure the best performance while preventing future oscillations.
Components of Stabilization
The Guardian employs two major techniques to stabilize your model: “rate stabilization and “orientation stabilization”. Sometimes called “derivative” and “proportional”
stabilization respectively, these two behaviors work together to smooth out bumps in the air while keeping your model in the orientation you want it.
Rate Stabilization
This is the reaction of the model to instantaneous motion. Specifically, it is the movement of your servos to oppose the angular rate of your model. The faster your model
is rotating in a given direction, the harder the Guardian will oppose that motion. This is the effect that smoothes turbulence and makes your model feel more stable. In
addition, when you fly in 3D Mode with 3D Heading Hold disabled, this is the only type of stabilization used.
Orientation Stabilization
This is the reaction of the model to the error between its current orientation and its commanded orientation. For instance, in 2D Mode with the sticks centered, the further
the model is brought from level orientation, the harder the Guardian will fight to bring it back. This behavior is also used in 3D Mode when 3D Heading Hold is active to
keep the model pointed in its locked direction.







































































