













Содержание EWM-2SS-DAD/22E-PN
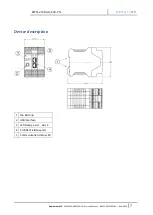
Страница 1: ...89475 119 ETM EWM 2SS DAD 22E Profinet Interface Digital Card Start up manual Duplomatic MS S p A...
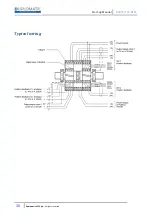
Страница 16: ...Start up Manual 89475 119 ETM 16 Duplomatic MS S p A All rights reserved Typical wiring...
Страница 50: ...Start up Manual 89475 119 ETM 50 Duplomatic MS S p A All rights reserved...







































































