





























Turbo PMAC PCI Lite
12
Machine Connections
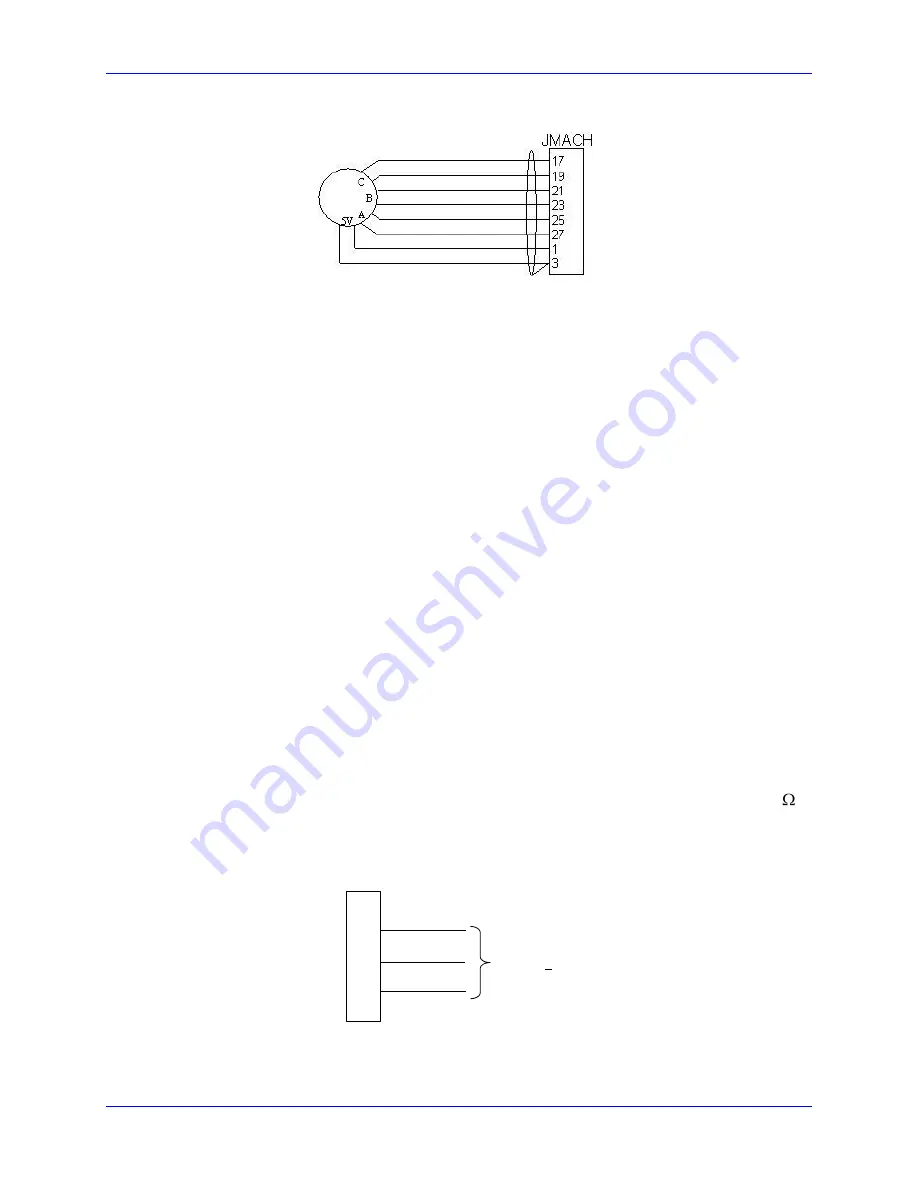
Example:
differential quadrature encoder connected to channel #1
DAC Output Signals
If PMAC is not performing the commutation for the motor, only one analog output channel is required to
command the motor. This output channel can be either single-ended or differential, depending on what
the amplifier is expecting. For a single-ended command using PMAC channel 1, connect DAC1 (pin 43)
to the command input on the amplifier. Connect the amplifier's command signal return line to PMAC's
AGND line (pin 58). In this setup, leave the DAC1/ pin floating. Do not ground it.
For a differential command using PMAC channel 1, connect DAC1 (pin 43) to the plus-command input
on the amplifier. Connect DAC1/ (pin 45) to the minus-command input on the amplifier. PMAC’s
AGND should still be connected to the amplifier common. If the amplifier is expecting separate sign and
magnitude signals, connect DAC1 (pin 43) to the magnitude input. Connect AENA1/DIR1 (pin 47) to the
sign (direction input). Amplifier signal returns should be connected to AGND (pin 58). This format
requires some parameter changes on PMAC. (See
Ix25.) Jumper E17 controls the polarity of the direction
output. This may have to be changed during the polarity test. This magnitude-and-direction mode is
suited for driving servo amplifiers that expect this type of input and for driving voltage-to-frequency
(V/F) converters, such as PMAC’s Acc-8D Option 2 board, for running stepper motor drivers.
If using PMAC to commutate the motor, use two analog output channels for the motor. Each output may
be single-ended or differential, just as for the DC motor. The two channels must be numbered
consecutively, with the lower-numbered channel having an odd number (e.g., use DAC1 and DAC2 for a
motor, or DAC3 and DAC4, but not DAC2 and DAC3, or DAC2 and DAC4).
For our motor #1 example, connect DAC1 (pin 43) and DAC2 (pin 45) to the analog inputs of the amplifier.
If using the complements as well, connect DAC1/ (pin 45) and DAC2/ (pin 46) the minus-command inputs;
otherwise leave the complementary signal outputs floating. To limit the range of each signal to +/- 5V, use
parameter Ix69. Any analog output not used for dedicated servo purposes may be utilized as a general-
purpose analog output. Usually this is done by defining an M-variable to the digital-to-analog-converter
register (suggested M-variable definitions M102, M202, etc.), then writing values to the M-variable. The
analog outputs are intended to drive high-impedance inputs with no significant current draw. The 220
output resistors will keep the current draw lower than 50 mA in all cases and prevent damage to the output
circuitry, but any current draw above 10 mA can result in noticeable signal distortion.
Example:
JMACH1
DAC1
DAC1/
AGND
43
45
58
Connect to the
amp10V
command input
Содержание Turbo PMAC PCI-Lite
Страница 4: ......
Страница 8: ......
Страница 32: ...Turbo PMAC PCI Lite 24 Hardware Reference Summary Board Dimensions Part Number 603657 105...





















































