





























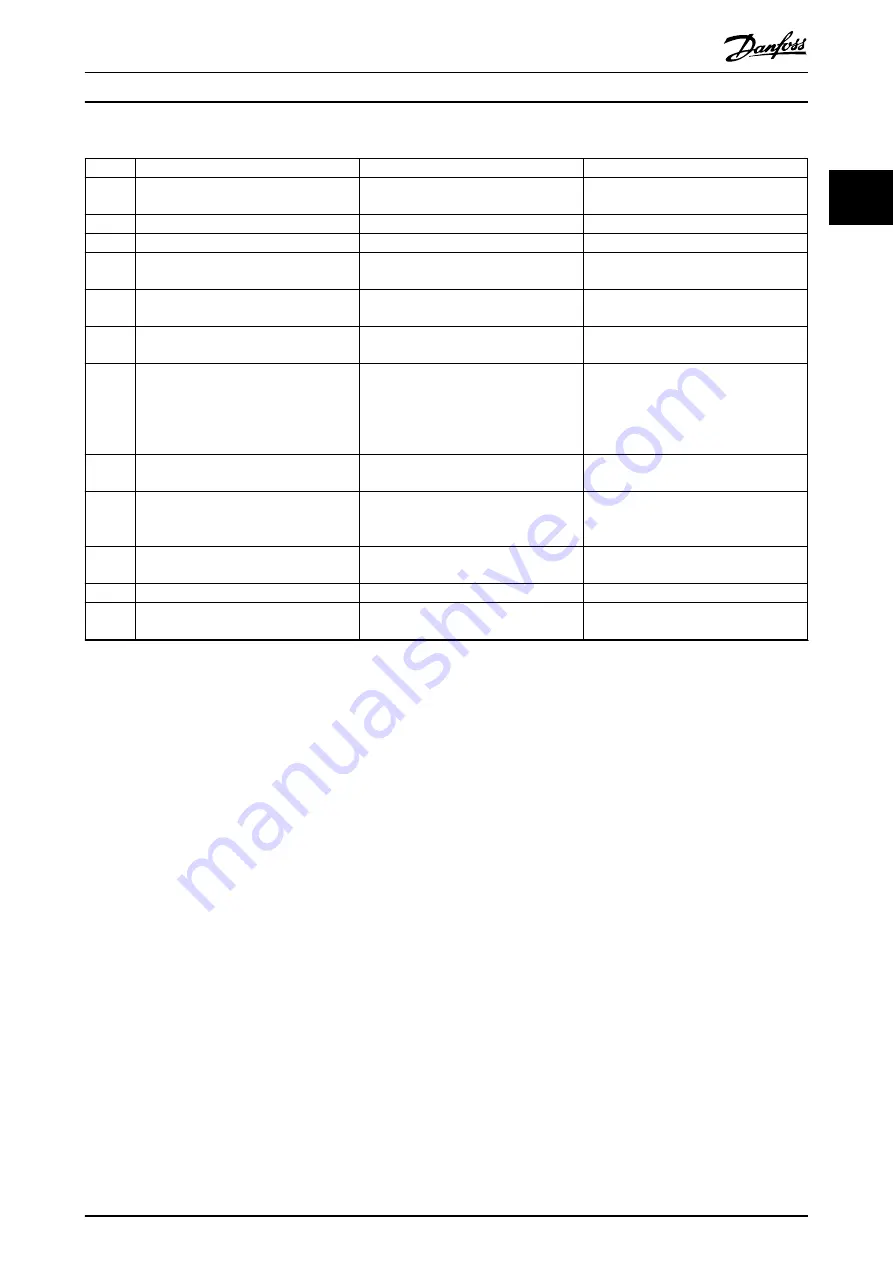
Commissioning test using bit-wise readout
Test steps
Reason for the test step
Expected result
1
Run the application (all the servo drives
are enabled).
Check that the application can run.
Application runs as expected.
2
Stop the application.
–
All servo drives are at speed 0 RPM.
3
Disable all the servo drives.
–
All servo drives are disabled.
4
Enable STO.
Check that STO can be activated without
error.
Statusword
bit 3 = 0 and bit 14 =1 in all
servo drives.
5
Disable STO.
Check that STO can be deactivated
without error. No reset is required.
Statusword
bit 3 = 0 and bit 14 =0 in all
servo drives.
6
Run the application (all the servo drives
are enabled).
–
Application runs as expected.
7
Enable STO.
Check that errors are generated correctly
when STO is activated while the servo
drives are running.
Motors are torque free. Motors coast and
stop after some time.
Statusword
bit 3 = 1, bit 14 = 1 and
object 0x603F shows fault 0xFF80 in all
servo drives.
8
Try to run the application (enable 1 or
more servo drives).
Checks that the STO function is working
correctly.
Application does not run.
9
Disable STO.
Check that the STO start is still inhibited
by the error signal.
Statusword
bit 3 = 1, bit 14 = 0 and
object 0x603F shows fault 0xFF80 in all
servo drives.
10
Try to run the application (enable 1 or
more servo drives).
Check whether reset is required.
Application does not run.
11
Send a reset signal via the PLC.
–
Statusword
bit 3 = 0 in all servo drives.
12
Try to run the application (all servo drives
are enabled).
–
Application runs as expected.
Table 2.7 Commissioning Test using Bit-Wise Readout
System Overview
Design Guide
MG36C102
Danfoss A/S © 08/2017 All rights reserved.
19
2
2





















































