
























www.colmac.ie
9
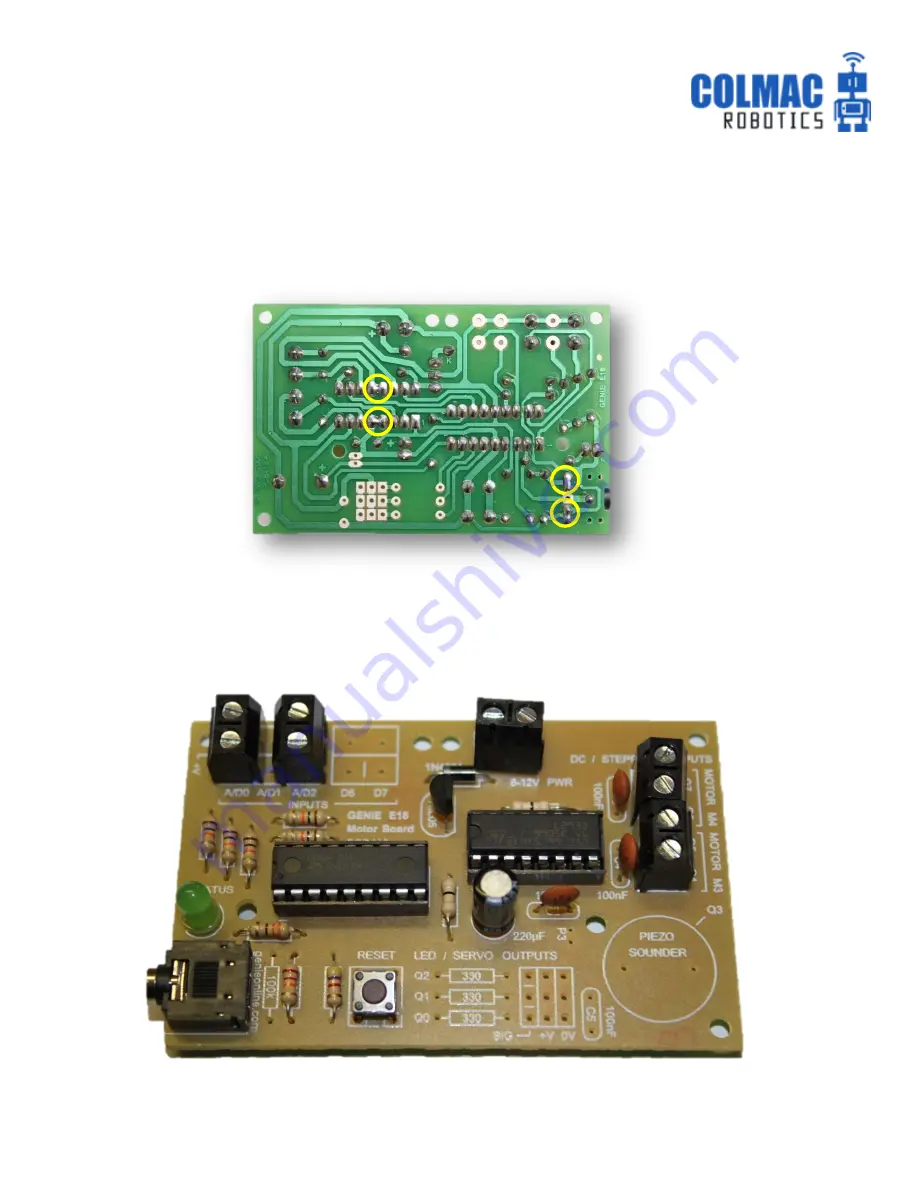
NOTE:
Soldering should be neat and uniform. Connections should not touch each other unless they
are supposed to as circled below.
Step 7: Insert E18 and L293D microchips
Try to handle the chip legs as little as possible but ensure that all legs are properly inserted into
their socket.
L293D
E18







































































