CCM12 CANbus
User Manual
22
9M02-7717-A001-EN
Version 3.0
4.2
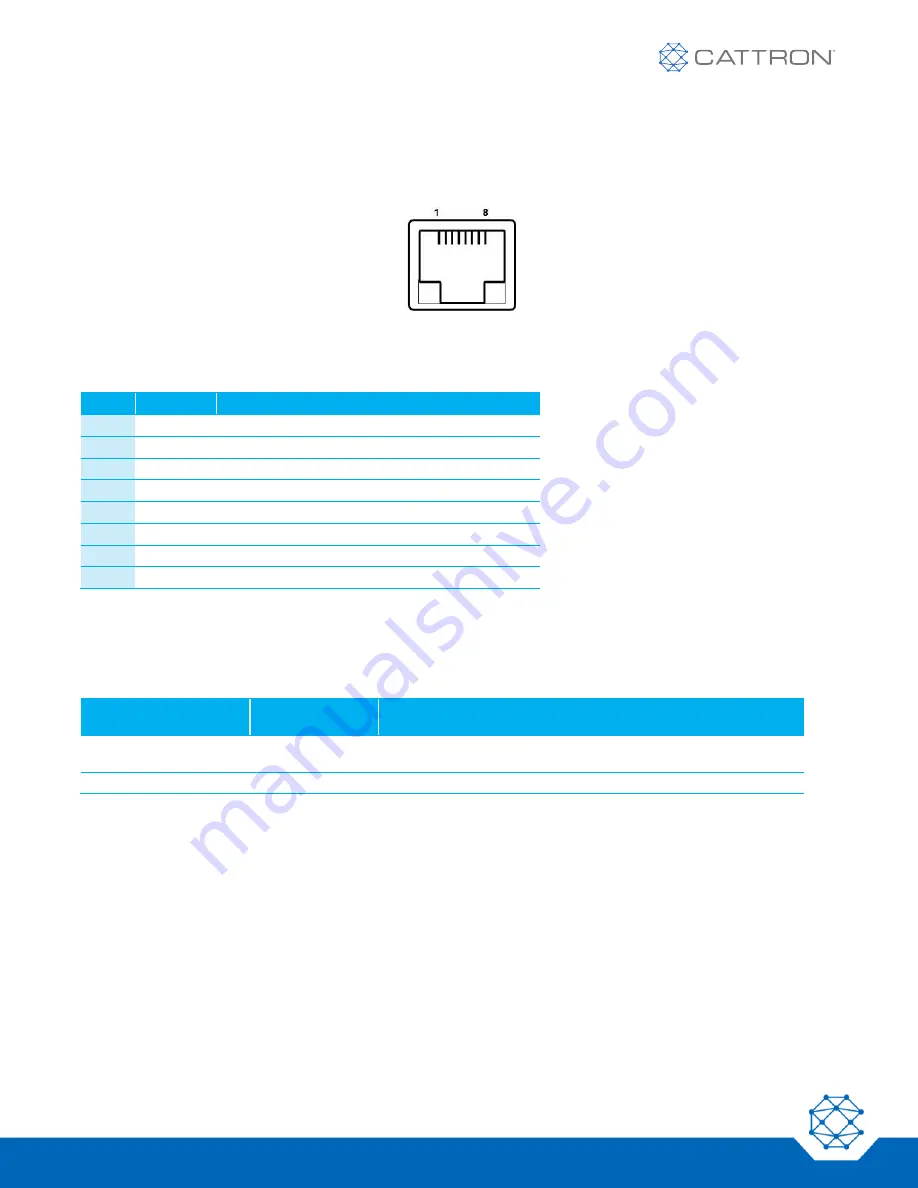
Programming Connector
Connector Type:
RJ45 Jack
This connector is located inside the enclosure.
Figure 13: RJ45 Jack Connector
Table 16: RJ45 Jack Connector
PIN
SIGNAL
DESCRIPTION
1
TXD_S
TX data
– Slave
2
RXD_S
RX data
– Slave
3
PRG_S
Programming mode
– Slave (active high)
4
PRG_M
Programming mode
– Master (active high)
5
RXD_M
RX data
– Master
6
TXD_M
TX data
– Master
7
VCC
3.3VDC, provided from board power supply
8
GND
4.3
RF Connector
Connector Type:
TNC variant
Table 17: RF Connector
CATTRON MCU P/N
CONNECTOR
TYPE
REMARK
1MCU-7717-A001
RP-TNC jack
Reverse polarity connector is used to comply to FCC part15
requirements for intentional radiators
1MCU-7717-A101
TNC jack
Содержание CattronControl CCM12
Страница 1: ...CCM12 CANbus User Manual ...