





















BRONKHORST®
9.17.061
EL-FLOW
Base
Series Mass Flow Controllers
Page 33
4.1.5 Controller Response Adjustment
The controller settling time of EL-FLOW
Base
instruments is factory adjusted to approximately 1 second
at customer process conditions.
When real process conditions differ from supplied data, or when a faster or slower controller response is
needed, a readjustment can be performed.
Settling time is defined as the time to reach the setpoint (and stay) within
2% of the initial setpoint
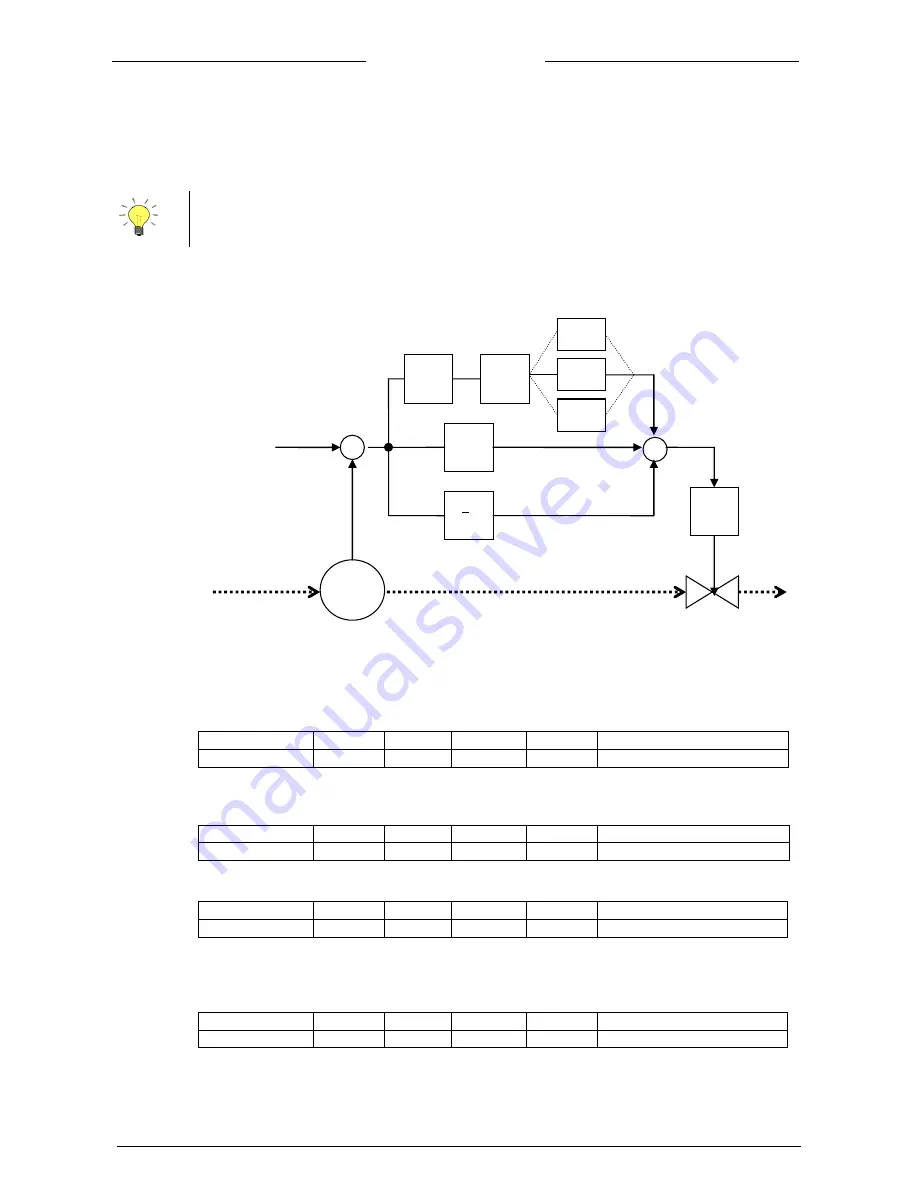
The picture below shows the basic controller diagram of the EL-FLOW
Base
. It consists of a standard PID
controller with a number of add-ons.
Basically, when a faster or slower controller response is needed, only the controller gain Kspeed or Kp
has to be changed.
Kp (PID-Kp)
Type
Access
Range
FlowDDE
FlowBus
ModBus PDU
Float
RW
0…1E+10 167
114/21
0xF2A8..0xF2A9/62121..62122
Proportional action of the PID controller.
Kspeed
Type
Access
Range
FlowDDE
FlowBus
ModBus PDU
Float
RW
0…1E+10 254
114/1
0xF2F0..0xF2F1/62193..62194
Ti (PID-Ti)
Type
Access
Range
FlowDDE
FlowBus
ModBus PDU
Float
RW
0…1E+10 168
114/22
0xF2B0..0xF2B1/62129..62130
Integration action in seconds of the PID controller.
The value should not be changed.
Td (PID-Td)
Type
Access
Range
FlowDDE
FlowBus
ModBus PDU
Float
RW
0…1E+10 169
114/23
0xF2B8..0xF2B9/62137..62138
Differentiation action in seconds of the PID controller.
Default Value: 0.0
This value should not be changed.
∫
d
dt
+
K
speed
S
+
-
+
Curve
Corr
Sensor
Control Valve
Flow
Setpoint
K
p
K
open
K
normal
K
stable
P
I
D







































































