























www.balluff.com
9
english
Ignition protection
“nA” and “tb”
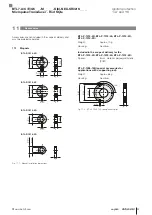
Fig. 3-1:
30°
34
40-1
6
Ø D1
Ø 18 h6
60
25
20.5
G
Ø 79
Ø 64
Ø 6.4
Ø 11
86
20.5
11.5
~18
6
Version
D1
G
…-K-…
10.2 mm
Thread
M4x4/6 deep
…-K8-…
8 mm
No thread
Transducer BTL7-…-K(8)-… transducer, construction and function
3.1
Construction
Electrical connection:
The electrical connection is made
via a cable or a connector (see Type code breakdown on
page 25).
Housing:
Housing containing the processing electronics.
Fastening:
For secure fastening, tighten the transducer
with cylinder screws (ISO 4762, M6 × 16 - A2-70) at all
6 mounting holes (see Figure 3-1). All screws must be
tightened with 3.5 Nm.
The transducers with Ø 10.2 mm have an additional thread
at the end of the rod to support larger nominal lengths.
Magnet:
Defines the position to be measured on the
waveguide. Magnets are available in various models and
must be ordered separately (see Accessories on page 23).
Nominal length:
Defines the available measuring range.
Rods with various nominal lengths from 25 mm to
5500 mm are available depending on the version:
– Ø 10.2 mm: Nominal length from 25 mm to 5500 mm
– Ø 8 mm: Nominal length from 25 mm to 1016 mm
Damping zone:
Area at the end of the rod that cannot be
used for measurements, but which may be passed over.
3
Construction and function
BTL7-…-SR32
BTL7-… cable
Mounting
surface
1)
Unusable area
2)
Not included in scope of delivery
Damping zone
Magnet
1)
Nominal length =
Measuring range
2)
1)
6 holes to fasten
the transducer
3.2
Function
The Micropulse Transducer contains the waveguide which
is protected by an outer stainless steel tube (rod). A
magnet is moved along the waveguide. This magnet is
connected to the system part whose position is to be
determined.
The magnet defines the position to be measured on the
waveguide.
An internally generated INIT pulse interacts with the
magnetic field of the magnet to generate a torsional wave
in the waveguide which propagates at ultrasonic speed.
The component of the torsional wave which arrives at the
end of the waveguide is absorbed in the damping zone to
prevent reflection. The component of the torsional wave
which arrives at the beginning of the waveguide is
converted by a coil into an electrical signal. The travel time
of the wave is used to calculate the position. Depending
on the version, this information is made available as a
voltage or current output with a rising or falling gradient.
BTL7-A/C/E/G5 _ _ -M _ _ _ _ -K(8)-NEX-SR32/K_ _ _
Micropulse Transducer - Rod Style
Содержание BTL7-A5 Series
Страница 2: ...www balluff com ...







































































