




























18
italiano
6
Interfaccia IO-Link (continua)
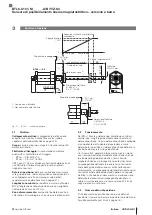
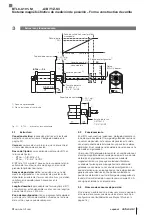
6.6.9 Output Characteristic
Questo parametro definisce la funzione di emissione del
BTL con linea caratteristica ascendente o discendente.
L’accesso avviene tramite Subindex 0.
Valore
Funzione di emissione
0x00 (FALSE) Discendente (punto zero all’estremità
barra)
0xFF (TRUE)
1)
Ascendente (punto zero sulla testina
elettronica)
1)
Impostazione predefinita
Tab. 6-9: Output Characteristic
6.6.10 Magnet Mode
Il numero di datori di posizione può essere impostato fisso
o flessibile.
Impostazione fissa del numero di datori di posizione
Per l’impostazione fissa di uno o due datori di posizione, il
BTL verifica costantemente il numero di datori di posizione
riconosciuti. Se non vi è corrispondenza con la
preimpostazione, l’applicazione è in stato di errore: tutti i
valori dei dati di processo vengono sostituiti con il valore di
errore.
Flexible Magnet Mode (FMM)
Con Flexible Magnet Mode, il numero di datori di posizione
è flessibile, in modo che possa essere modificato anche
durante il funzionamento.
Il momento in cui un datore di posizione “si avvicina” o
viene rimosso è critico, poiché la registrazione deve essere
regolata nuovamente e, se necessario, i contenuti dei valori
dei dati di processo si spostano. Per questo caso è
definito un cosiddetto tempo di diagnosi che può essere
configurato nel BTL. Durante questo periodo di tempo, per
tutte le variabili dei dati di processo viene emesso un valore
errore e una diagnosi corrispondente (avvertenza) viene
trasmessa tramite IO-Link. Trascorso il tempo di diagnosi,
viene visualizzato il nuovo stato dell’applicazione.
Struttura del parametro
Il parametro
Magnet Mode
è costituito da due valori interi 8
bit senza segno: numero magneti e tempo di diagnosi.
Per il numero magneti è possibile impostare i seguenti
valori:
0 = Numero magneti flessibile (1 o 2)
1 = 1 datore di posizione (impostato fisso)
2 = 2 datore di posizione (impostato fisso)
Il tempo di diagnosi viene impostato a passi di 4 ms, come
di seguito illustrato:
1
= 4 ms
2
= 8 ms
…
255 = 1,02 s
Accesso ai parametri
L’accesso ai parametri è possibile come di seguito
illustrato:
– Subindex 0: Byte 1 = Tempo diagnosi
Byte 0 = FMM Mode
– Subindex 1: Magnet Mode
– Subindex 2: Tempo diagnosi
6.6.11 PD In Mapping
Questo parametro serve a mappare le informazioni
desiderate su PDV (vedere
pagina 14). Ogni PDV può essere configurato tramite
Subindex corrispondente.
A ogni PDV è assegnato un intero 8 bit senza segno come
valore Mapping. Si possono impostare le seguenti
possibilità:
Valore
Denominazione
0x00
Valore posizione datore di posizione 1
0x01
Valore posizione datore di posizione 2
0x10
Valore di velocità datore di posizione 1
0x11
Valore di velocità datore di posizione 2
0x30
Temperatura interna attuale apparecchio
0x40
Differenza tra datore di posizione 1 e 2
0xFD
Modulo vuoto (emissione come valore 0)
Tab. 6-10: PD In Mapping
Messaggi di errore
Se una parametrizzazione non riesce, sono memorizzati
determinati messaggi di errore.
Codice
errore
Messaggio di errore
0×8011
Index not available
0×8012
Subindex not available
0×8020
Service temporarily not available
0×8030
Value out of Range
0×8033
Parameter Length overrun
0×8034
Parameter Length underrun
0×8036
Function temporarily unavailable
Tab. 6-11: Messaggi di errore specifica IO-Link
BTL6-U101-M _ _ _ _ -A/B/Y/Z-S4
Sensore di posizionamento lineare magnetostrittivo – versione a barra
Содержание BTL6-U101-M****-A-S4 series
Страница 2: ...www balluff com...
Страница 3: ...BTL6 U101 M_ _ _ _ A B Y Z S4 Betriebsanleitung deutsch...
Страница 4: ...www balluff com...
Страница 27: ...BTL6 U101 M_ _ _ _ A B Y Z S4 User s Guide english...
Страница 28: ...www balluff com...
Страница 51: ...BTL6 U101 M_ _ _ _ A B Y Z S4 Notice d utilisation fran ais...
Страница 52: ...www balluff com...
Страница 75: ...BTL6 U101 M_ _ _ _ A B Y Z S4 Manuale d uso italiano...
Страница 76: ...www balluff com...
Страница 99: ...BTL6 U101 M_ _ _ _ A B Y Z S4 Manual de instrucciones espa ol...
Страница 100: ...www balluff com...
Страница 123: ......







































































