





























2695 Series Operation Manual
EZT-2695-8000/1
Page
56
of
124
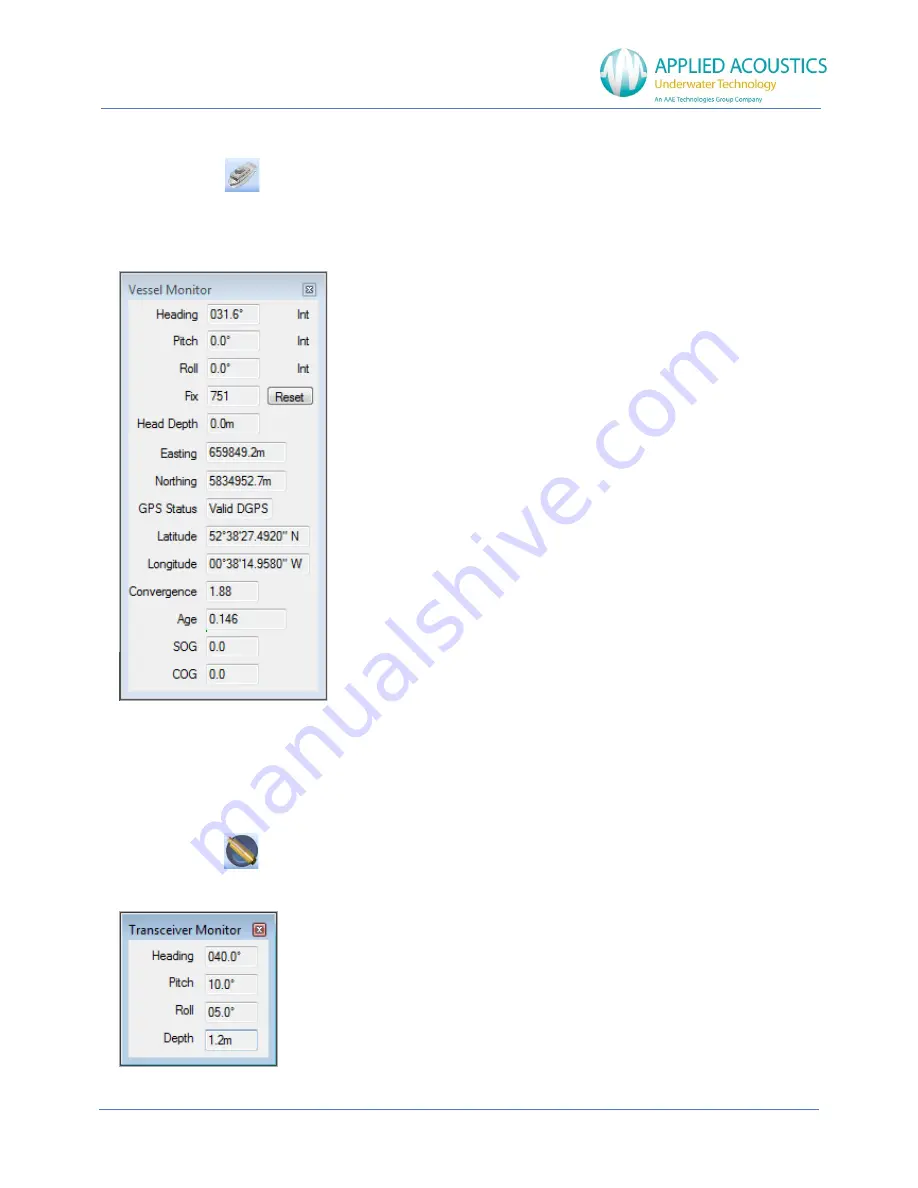
Vessel Monitor
Toolbar Button Shortcut Key: Ctrl+V
The Vessel Monitor will display the all vessel’s parameters including Heading, Pitch, Roll, GPS
Position, Speed Over Ground (SOG) and Course Over Ground (COG) and the age of the GPS
position relative to the last received beacon response.
The Vessel Monitor also indicates if internal (Int.) or external (Ext.) heading, pitch and roll are
selected.
The fix number may be reset by pressing the ‘Reset’ button.
Transceiver Monitor
Toolbar Button Shortcut Key: Ctrl+T
The Transceiver Monitor window displays the heading, pitch, roll and depth of the transceiver.
Содержание Easytrak Nexus Lite 2683
Страница 1: ...Easytrak Nexus Lite 2695 Series Operation Manual ...
Страница 13: ...2695 Series Operation Manual EZT 2695 8000 1 Page 13 of 124 ...
Страница 85: ...2695 Series Operation Manual EZT 2695 8000 1 Page 85 of 124 Summary Report ...
Страница 86: ...2695 Series Operation Manual EZT 2695 8000 1 Page 86 of 124 Complete Listing of Dataset ...
Страница 88: ...2695 Series Operation Manual EZT 2695 8000 1 Page 88 of 124 ...
Страница 89: ...2695 Series Operation Manual EZT 2695 8000 1 Page 89 of 124 ...





















































