





















Temposonics
®
MH Digital
Operating Manual
I
16
I
SAE J1939
SAE J1939 is provided with extended message arbitration. Compared to CANopen, the message identifier has been extended to 29 bits. Due
to this protocol extension, different message prioritization and assignment of bus sharing units is implemented. For large quantities of data, in
particular, utilization of a separate transport protocol is possible. The communication objects are:
PDU (Protocol Data Unit)
In general, the protocol distinguishes two types of messages. The
PDU1 message format is used for peer-to-peer data transmission.
Messages in PDU2 format are addressed to all bus sharing units.
PG (Parameter Groups)
Process data and parameters in a message are transmitted in groups.
This means that a standard set of parameters is read or transmitted
with a message. This parameter group data structure determined in
the protocol permits an efficient bus load.
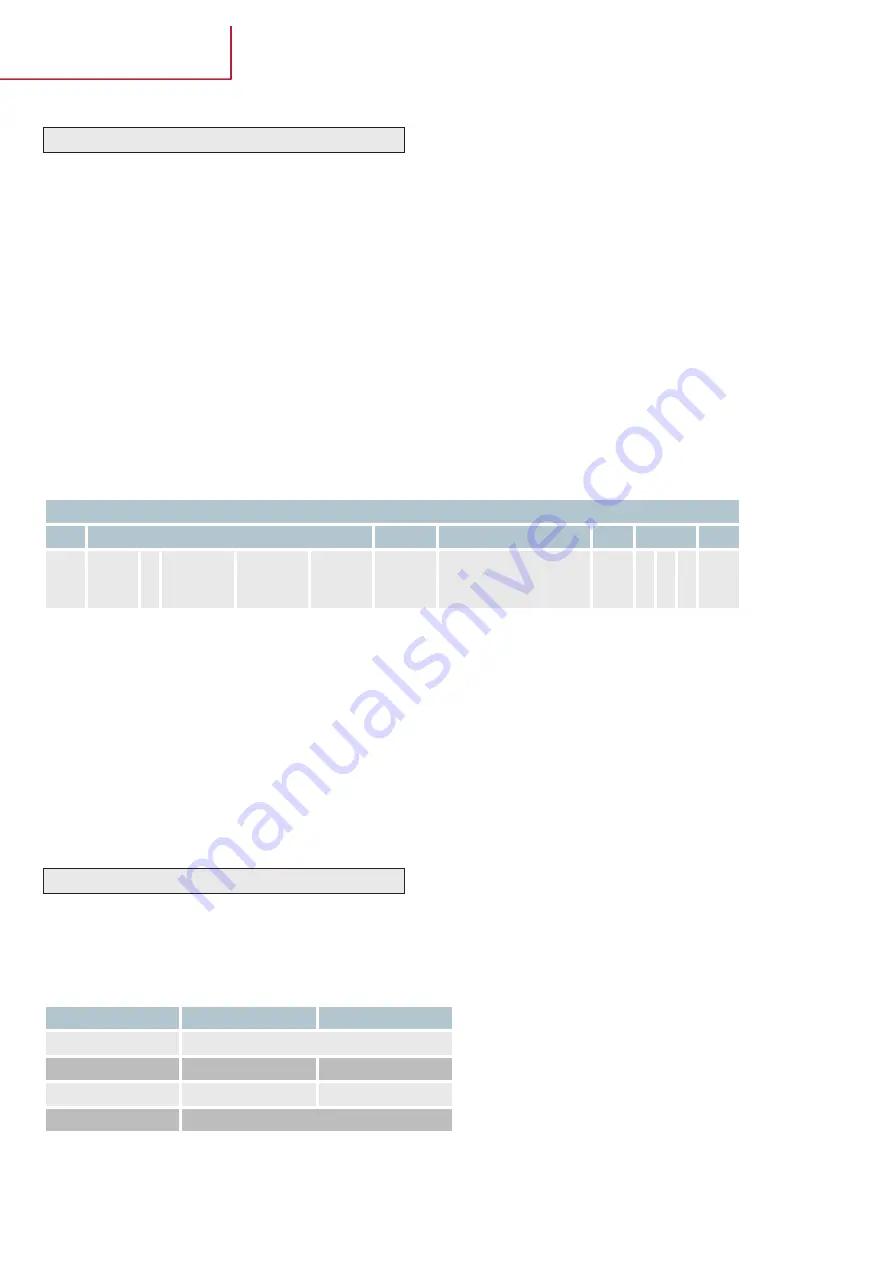
According to the SAE J1939 protocol, a message has the following structure:
PDU
SOF
Arbitration identifier
Control
Data field
CRC
ACK
EOF
1
Priority
3
2
PDU
Format
8
PDU
Specific
8
Source
8
6
0..8
Bytes
15
1 1 1
7
Fig. CAN bus data protocol with J1939 identifier
10. Starting the operation
After having performed the electrical connection to the network, the sensor is ready to start the operation and configuration. Prior to the actual
system start-up, however, the communication parameters for operation in the CAN bus must be set. Only the basic procedure is described in
these operating instructions. For the applicable commands used to realize the sensor setting, please, refer to the enclosed programming in-
structions.
10.1 Node parameter setting
CANopen & CANopen Safety
To operate the sensor in the CAN bus, the network characteristics must be defined. The basic settings for integration of a bus sharing unit are
made using LSS (Layer Setting Services). Each sensor (node) in the CAN network is provided with a unique definition due to its LSS address.
This address is composed as follows.
LSS Adress:
Moreover, parameters specific to the CAN bus, such as baud rate and node ID are configured and saved via the LSS service. Both the baud rate
and the node ID of the sensor must be configured for operation in the particular CAN bus.
PGN (Parameter Group Number)
PGN is used for explicit and standardized identification of param-
eter group.
SPN (Suspect Parameter Number)
Is given by protocol and used for unique identification of parame-
ter signal. Hereby all J1939 compatible devices are informed about
the parameter structure.
TP (Transport Protocol)
is used for separate data transmission above 8 Bytes.
CANopen
CANopen Safety
Vendor-ID
0x40
Product-code
Cxx 0x43787800
Sxx 0x53787800
Revision number
1.01 0x312E3031
2.00 0x322E3030
Serial number
e.g. 04301234