





























AgileX Robotics (Dongguan) Co.,Ltd.
15
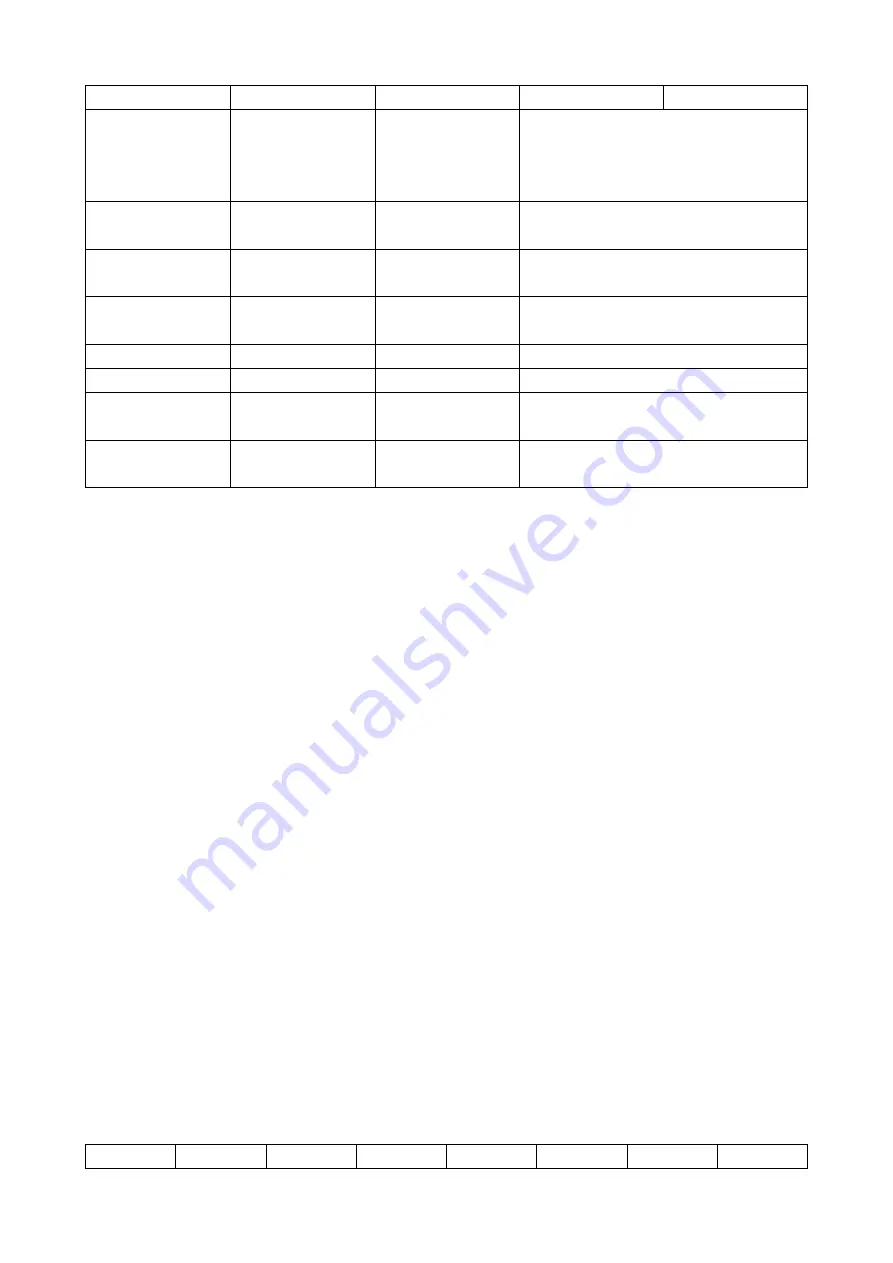
Position
Function
Data type
Description
byte [0]
Control mode
unsigned int8
0x00 Remote control mode
0x01 CAN command control mode
[1]
0x02 Serial port control mode
byte [1]
Failure clearing
command
unsigned int8
See Note 2 for details*
byte [2]
Linear speed
percentage
signed int8
Maximum speed 1.5m/s, value range (-
100, 100)
byte [3]
Angular speed
percentage
signed int8
Maximum speed 0.5235rad/s, value range
(-100, 100)
byte [4]
Reserved
-
0x00
byte [5]
Reserved
-
0x00
byte [6]
Count paritybit
(count)
unsigned int8
0 - 255 counting loops, which will be
added once every command sent
byte [7]
Parity bit
(checksum)
unsigned int8
Parity bit
Note 1 - Control mode instructions
In case the RC transmitter is powered off, the control mode of SCOUT 2.0 is defaulted to
command control mode, which means the chassis can be directly controlled via command.
However, even though the chassis is in command control mode, the control mode in the
command needs to be set to 0x01 for successfully executing the speed command. Once the RC
transmitter is switched on again, it has the highest authority level to shield the command control
and switch over the control mode.
Note 2 - Information about failure clearing command:
•
0x00 No failure clearing command
•
0x01 Clear battery under-voltage failure
•
0x02 Clear battery over-voltage failure
•
0x03 Clear No.1 motor communication failure
•
0x04 Clear No.2 motor communication failure
•
0x05 Clear No.3 motor communication failure
•
0x06 Clear No.4 motor communication failure
•
0x07 Clear motor drive over-temperature failure
•
0x08 Clear motor over-current failure
Note 3 - Example data: The following data is only used for testing
1. The vehicle moves forward at 0.15m/s.
byte [0]
byte [1]
byte [2]
byte [3]
byte [4]
byte [5]
byte [6]
byte [7]





















































