






1
FUZZY SMM
Piezo Kreisel mit Heading-Funktion für Flächenmodelle
Beschreibung
Wir freuen uns, daß Sie sich für den
FUZZY SMM
entschieden haben. Um die komplexe
Funktionsvielfalt genau zu verstehen, lesen Sie bitte diese Beschreibung komplett durch, bevor Sie mit
dem Betrieb beginnen. Für ganz Eilige gibt es auf den letzten beiden Seiten eine Kurz-Anleitung
Der Piezo-Kreisel
FUZZY SMM
dient der Stabilisierung von Flugmodellen. Der Kreisel erkennt durch
seine intelligente, selbstlernende Software mit Mikroprozessor-Elektronik und Piezo-Sensor jede
Bewegung des Modells um die Kreiselachse und erzeugt eine dieser Bewegung entgegengesetzte
Servostellung. Der Kreisel wird dazu lediglich zwischen das Steuerservo für diese Achse und dem
Empfänger angeschlossen. Es können auch Achsen stabilisiert werden, die mit 2 Servos gesteuert
werden. Die Wirkung kann in zwei Betriebsarten gewählt werden. MODE I entspricht einer Dämpfung
(Normal) der Drehbewegung. MODE II entspricht einer Haltewirkung (Heading) gegen
Drehbewegungen, die von außen auf ein Modell einwirken.
Die Ansprechempfindlichkeit des Kreisels kann mittels Zusatzkanal vom Sender aus frei gewählt und
damit dem Modell und dem Steuerempfinden des Piloten angepaßt werden. Außerdem wird mit dem
Empfindlichkeitskanal auch zwischen beiden Betriebsarten umgeschaltet, bzw. AUS und EIN-
geschaltet.
Der SMM-Sensor bietet gegenüber Piezo-Sensoren enorme Vorteile. Er ist völlig unempfindlich gegen
modelltypische Vibrationen, hat keine Temperaturdrift und ist mit einer sehr hohen Linearität bei
höchster Auflösung ausgestattet.
Die besten Ergebnisse werden bei Verwendung von schnellen Servos erzielt. Wir empfehlen
grundsätzlich die Verwendung von Futaba-Servos, da diese Servos optimal mit der schnellen
Signalaufbereitung des
FUZZY SMM
zusammenarbeiten. Servos anderer Hersteller können zum
leichten „knurren“ in der Nullstellung oder zu anderen Effekten neigen (Stromverbrauch).
Der
FUZZY SMM
kann für alle Flächenflugmodelle, sowohl Motormodelle als auch Segelflugmodelle,
zur Stabilisierung einer Flugmodellachse eingesetzt werden.
Grundlagen
Flugmodelle unterliegen während des Fluges ständig äußeren Einwirkungen, die sich in
Drehbewegungen äußern und ein Modell von der vorgesehenen Flugbahn abweichen lassen, z.B.
durch Windböen etc. Der FUZZY SMM erkennt dies und führt gegen jede von außen einwirkende
Drehbewegung eine entsprechende Gegensteuerbewegung über das Servo aus. Die Reaktionszeit ist
enorm schnell, viel schneller als jeder Pilot dies steuern könnte.
Im Normal-Modus (Mode I) wird gegen jede Drehbewegung wie ein „Stoßdämpfer“ (Mode I) gearbeitet,
z.B. bei Windböen.
Der
FUZZY SMM
besitzt eine zweite Betriebsart (Mode II), in dieser Betriebsart wirkt der
Steuerknüppelausschlag direkt auf den Kreisel, dieser steuert dann das Ruder bzw. Modell ohne
dämpfende Wirkung nach der Vorgabe des Steuerknüppels und hält dabei die vorgegebene
Drehgeschwindigkeit proportional zum Knüppelausschlag konstant.
Steuerbewegungen des Piloten führen auch zu Drehbewegungen, eine interne Ausblendung sorgt
jedoch dafür, daß vom Piloten gesteuerte Drehbewegungen nicht kompensiert werden.
Mode I, Normal
Betriebsart wie alle bisherigen Kreisel, arbeitet mit hoher Dämpfung auf dem jeweiligen Ruder, z.B. auf
Querruder eingesetzt, ob beim Start oder zur Landung, im Geradeausflug oder zum Thermik-Kreisen,
FUZZY SMM
hält das Modell stabil, keine Bö kann die Landeeinteilung mehr stören, keine noch so
bockige Thermik kann das Modell aus der Bahn werfen. Für Thermikflüge wird zum Suchen der
FUZZY SMM
abgeschaltet per Sender, sobald der „Bart“ gefunden ist,
FUZZY SMM
aktivieren und ab
geht’s nach oben im Zentrum vom Bart, herausfallen bei richtiger Anwendung (fast) unmöglich. Beim
Segler-Schlepp unentbehrlich auch für die Motormaschine, hält
FUZZY SMM
beide Modelle absolut
gerade und läßt keine abrupte Bewegungen über die Längsachse mehr zu. Auch auf dem Höhenruder
ergeben sich nicht gekannte Vorteile, z.B. springt kein Modell mehr bei der Landung, im Kunstflug
rastet das Modell regelrecht ein. Durch diese Eigenschaften
steigt die Leistung
des Modells, denn
insgesamt wird der Modellwiderstand, hervorgerufen durch Steuerausschläge der Ruder durch den
Piloten, geringer.
Mode II, Heading
Neue Betriebsart, empfohlen für alle Modelle mit Problemen beim Start, z.B. auf Seitenruder. Damit
wird ein Ausbrechen des Modells nicht nur verhindert, der Kurs wird in jedem Fall eingehalten. Mit der
Heading Funktion (engl. Kurs halten) wird das Modell in seine gedachte Richtung zurückgesteuert.
Diese eignet sich auch für alle andere Ruder, muß aber im Einzelfall ausprobiert werden.
Knüppelausschlag bewirkt eine Drehung des Modells um die stabilisierte Achse, die
Drehgeschwindigkeit ist immer proportional zum Knüppelausschlag. Der Knüppel steuert also die
Drehgeschwindigkeit des Modells, nicht mehr eine Richtung.
Bedienung
Einstell-Möglichkeiten
Der 4-Pol-DIP-Schalter dient der Einstellung der Parameter:
ON
OFF
1
Ausgang 1, Servo-Richtung NORMAL
Ausgang 1, Servorichtung REVERSE
2
HEADING Mode
NORMAL Mode
3
Set Servo Limit
NORMALbetrieb
4
Ausgang 2, Servo-Richtung NORMAL
Ausgang 2, Servorichtung REVERSE
EIN-schalten:
nach dem Einschalten des Empfängers/Kreisels,
Modell nicht bewegen bis die LED
blinkt oder sich die Servos steuern lassen
. Für einwandfreien Einschaltprozess nicht mehr als 80%
Empfindlichkeit einstellen, sonst wird dieser nicht beendet, die LED blinkt nicht. Im späteren Betrieb
kann die Empfindlichkeit bis 100% eingestellt werden.
Jedes verändern eines DIP-Switches wird erst nach AUS- und wieder EIN-schalten des Kreisels
wirksam. Vor dem Neu-EINschalten erst ca. 20-30 sec. Warten, erst dann sind neue
Schalterstellungen wirksam (Sicherheitseinrichtung Spannungsunterbrechung muß umgangen
werden).
DIP 1/4 - NORMAL/REVERSE
Polt die Ausgleichsrichtung des jeweiligen Servoausgangs um (s.u.).
Die Stellung des DIP-Schalters
wird nur beim Einschalten eingelesen, spätere Verstellung ist ohne Funktion
.
DIP 2 – NORMAL, NORMAL/HEADING
Mit diesem DIP-Switch kann gewählt werden, ob der Kreisel ausschließlich im Normal(Dämpfer)-
Modus oder wählbar zwischen Normal- und Heading-Modus (s.u.) arbeitet.
In Position ON von DIP-Schalter 2 stehen sowohl die NORMAL-Betriebsart (Mode I) als auch die
HEADING-Betriebsart (Mode II) zur Verfügung. Zwischen beiden Modi kann mit dem Gain-Kanal
(Schieberegler) gewählt werden. Die Wirkungsweise des GAIN-Kanals wird dazu derart geändert, daß
sich Empfindlichkeits-Minimum für beide Modi in der Mitte eines freien Kanals (Schieberegler oder
Schalter) befindet. Größere Werte auf eine Seite bewirken eine Aktivierung der HEADING-Funktion
(MODE II), bei Kanalmaximum wird 100% erreicht. Von Mitte zur anderen Seite wird der normale
Kreiselmodus (MODE I) in der Empfindlichkeit gesteuert. Zur Kontrolle für die Betriebsart ändert sich
die Blinkfrequenz der LED (s.u.).
Die Stellung des DIP-Schalters wird nur beim Einschalten
eingelesen.
DIP 3 - Set Limits, Servo-Endlagenabgleich
Befindet sich dieser Schalter während des EIN-schaltens des Kreisels in Position ON, startet der
Servoendlagen-Abgleich (LED blinkt dauernd). Im Sender sollte keine Wegreduzierung oder
Differenzierung programmiert sein. Der am zu stabilisierenden Ruder mechanisch mögliche Servoweg
wird nun mit dem jeweiligen Steuerknüppel nach beiden Seiten abgefahren. Der mechanische Weg
sollte dabei nach beiden Seiten gleich groß sein, das Servo bzw. das Steuergestänge darf dabei an
keine mechanischen Anschläge laufen. Abgespeichert wird die erreichte Maximalposition des Knüppels
nach einer Seite. Eingestellt wird dabei der vom Kreisel gesteuerte Servoweg, nicht der Servoweg, der
am Sender gesteuert wird.
Ist der Weg eingelernt, DIP-Schalter in Position OFF bringen, damit wird der Weg abgespeichert. Nach
umlegen des DIP-Schalters in Position OFF bewegt sich das Servo zur Kontrolle nach
rechts - Mitte - links. Dieser Weg entspricht nun dem Weg, den das Servo bei vollem
Korrekturausschlag nach jeder Seite ausführen wird, der eingebaute Limiter verhindert dann, daß das
Servo mechanisch anläuft. Kreisel (Empfänger) ausschalten, wieder einschalten, der Kreisel befindet
sich wieder in Normalbetrieb.
Die Stellung des DIP-Schalters wird nur beim Einschalten
eingelesen, spätere Verstellung ist ohne Funktion
. Mit dieser Funktion sollten möglichst nur kleine
Korrekturen der Servoweg erfolgen (+/- 10%), die Qualität der Regelung könnte sonst negativ
beeinflußt werden.
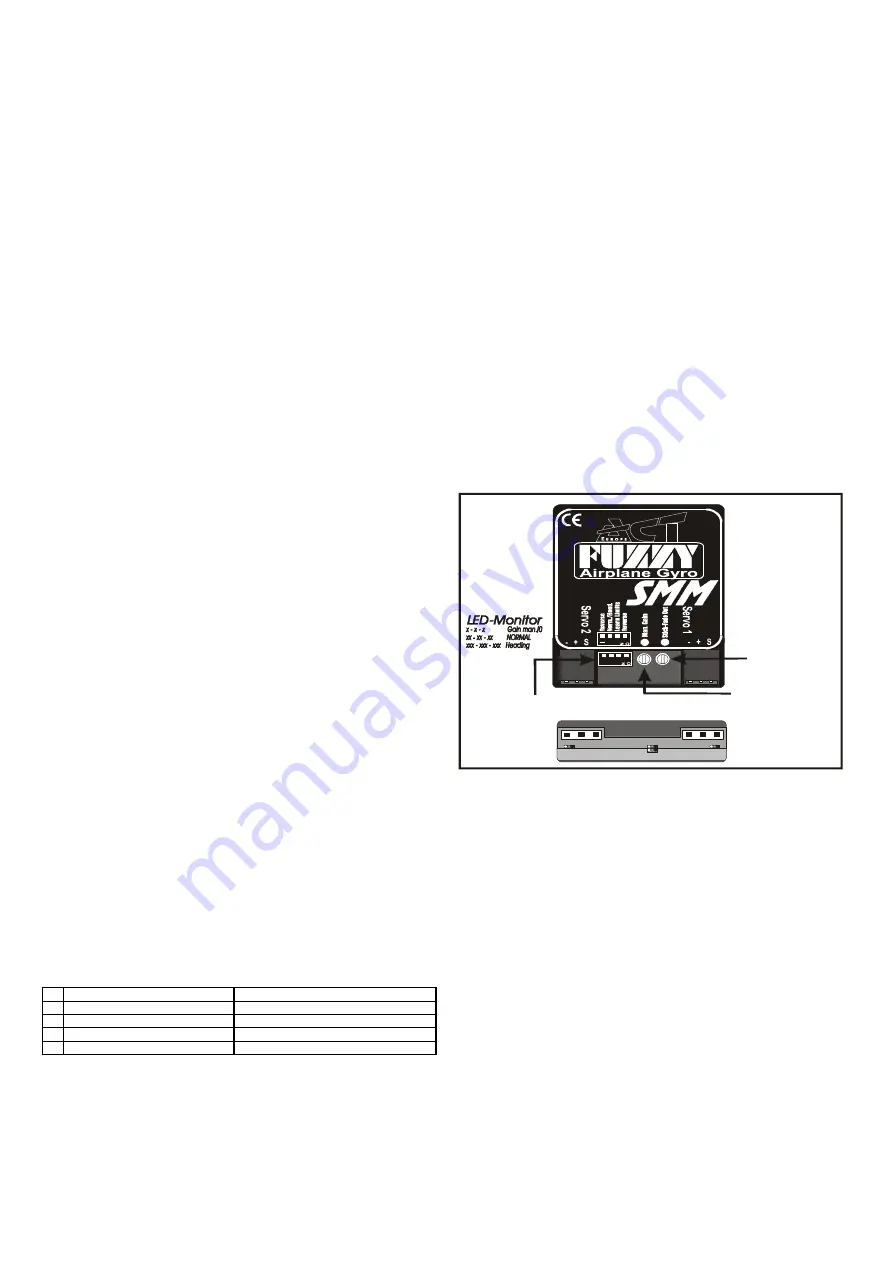
Ausgang 2
Output 2
Ausgang 1
Output 1
Man. Gain/Dynamic
Ausblendung
Stick fade out
DIP-Switch
1 2 3 4
Einstell-Potentiometer
Einsteller 1, Dynamik-Trimmer
Grundlage für Dynamikeinstellung:
Ziel beim Fliegen mit Kreiseln ist, mit der maximal möglichen
Kreisel-Empfindlichkeit zu fliegen. Dann wird optimale Kreiselunterstützung bei größt möglicher
Steuerpräzision erreicht. Wird die Empfindlichkeit erhöht, wird sich das Modell ab einem bestimmten
Punkt aufschwingen, eine weitere Erhöhung der Empfindlichkeit beschleunigt das Aufschwingen. Der
Punkt, an dem das Aufschwingen beginnt, ist sehr stark von den mechanischen Faktoren im Modell
abhängig wie z.B. Reibung der Anlenkung, Kraft des Servos, Reproduzierbarkeit der Servopositionen
und vor allem von der Geschwindigkeit des verwendeten Servos. Der Dynamik-Regler ermöglicht nun,
den Kreisel in etwa auf die vorhandenen mechanischen Gegebenheiten einzustellen. Wird der Regler
aus der Mitte heraus auf die ungünstige Seite verdreht, schwingt sich das Modell noch stärker auf.
Dreht man den Regler zur richtigen Seite (abhängig von den mechanischen Gegebenheiten), kann
man die Empfindlichkeit nun weiter aufdrehen und damit das Kreiselergebnis nochmals verbessern.
Drehung nach links = weicher, Drehung nach rechts = härter.
Bei Kreiselbetrieb in MODE I (NORMAL) liegt in Mittelstellung eine neutrale Einstellung vor, nach links
wird die „Einrastwirkung“ weicher, nach rechts härter. Bei Aufschwingen des Modells, Trimmer in
Richtung
weich
drehen.
Im Mode II, (HEADING) beeinflußt der Trimmer die Ausregelgeschwindigkeit und die Positions-
Haltepräzision von weich bis hart.
Einsteller 2, Ausblendpunkt
Mit diesem Einsteller kann eingestellt werden, an welchem Punkt des Knüppelausschlags die Wirkung
des Kreisels abgeschaltet ist (intelligente Ausblendung, s.u.). Die Einstellung kann gewählt werden
zwischen 20% und 100% des Knüppelwegs.
Die Wirkung der Potis erfolgt immer etwas verzögert, also beim Test nach erfolgter Verstellung etwas
abwarten.
LED-Monitor
Nach dem Einschaltabgleich:
Kein Blinken
Empfindlichkeit=0, Kreisel abgeschaltet
X-X-X
Gain Kanal nicht belegt, man. Gain aktiv
XX-XX-XX
Betriebsart Modus 1, Normal, alles OK
XXX-XXX-XXX
Betriebsart Modus II, Heading, alles OK
Blinkt die LED 4 oder 5 mal schnell, kann der Kreisel nicht betrieben werden. In diesem Fall liegt eine
nicht wiederherstellbare Veränderung des Piezo-Sensors vor, sei es durch Vibration, Alterung usw.







































































