EN - 16
BAL.0361.0 • 2021-02-25
6 Commissioning
iCAT mini
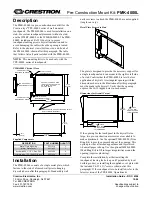
6.3 Attaching the iCAT mini to the robot
1
Mount the robot flange
with eight cylinder head screws M4 × 10
max. tightening torque of M = 4 Nm on the robot
.
The cylinder bolt
specifies the reference position relative to the robot.
2
Mount the sealing ring of the
iCAT mini
.
3
Screw the
iCAT mini (1)
with eight cylinder head screws M4 × 10
and a
max. tightening torque of M=4 Nm on the robot flange
NOTICE
• To fasten the
iCAT mini
to the robot
, a robot flange
is required. The flange
version used depends on the welding robot
used. Information on available robot
flanges is available upon request.
1
iCAT mini
2
8 x cylinder head screw M4 × 10
3
Sealing ring
4
8 × cylinder head screw
M4 × 10
5
Cylinder bolt
6
Robot flange
7
Welding robot
Fig. 5
Attaching the
iCAT mini
to the robot
Fig. 6
Mounting the sealing ring
1
2
3
4
5 6
7
Содержание iCAT mini
Страница 4: ...DE 4 BAL 0361 0 2021 02 25 1 Identifikation iCAT mini 1 2 EU Konformitätserklärung ...
Страница 39: ...BAL 0361 0 2021 02 25 EN 5 iCAT mini 1 Identification 1 2 EU declaration of conformity ...
Страница 73: ...BAL 0361 0 2021 02 25 ZH 5 iCAT mini 1 标识 1 2 欧盟符合性声明 ...
Страница 109: ...BAL 0361 0 2021 02 25 JA 5 iCAT mini 1 概要 1 2 EU 適合宣言 ...
Страница 146: ...BAL 0361 0 2021 02 25 Notizen Notes 记录 メモ iCAT mini Notizen Notes 记录 メモ ...
Страница 147: ...BAL 0361 0 2021 02 25 iCAT mini Notizen Notes 记录 メモ Notizen Notes 记录 メモ ...