





























1 Description
1.5.3 Maximum load and moment of inertia for full and limited axis 5 (center line down) movement
28
Rev.E
3HAC 025861-001
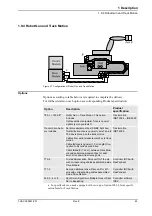
1.5.3 Maximum load and moment of inertia for full and limited axis 5 (center line
down) movement
Full movement of axis 5
Figure 16 Moment of inertia when full movement of axis 5.
Total load given as: Mass in kg, center of gravity (Z and L) in meter and moment of inertia (J
ox
, J
oy
,
J
oz
) in kgm
2
. L =
√
(X
2
+ Y
2
Axis Robot Type
Maximum moment of inertia
5
IRB 6620-150/2.2
Ja5 = Load
x
((Z + 0,200)
2
+ L
2
) + max (J
0x
, J
0y
)
≤
1
38 kgm
2
6
IRB 6620-150/2.2
Ja6 = Load
x
L
2
+ J
0Z
≤
107 kgm
2
Pos
Description
A
Center of gravity.
Description
J
ox
, J
oy
, J
oz
Max. moment of inertia around the X, Y and Z axes at center of gravity.
Содержание IRB 6620
Страница 1: ...Product specification Articulated robot IRB 6620 150 2 2 M2004...
Страница 2: ......
Страница 3: ...Product specification Articulated robot 3HAC025861 001 Rev E IRB 6620 150 2 2 M2004...
Страница 34: ...1 Description 1 6 1 General 32 Rev E 3HAC 025861 001 Figure 20 Holes for mounting of extra equipment...
Страница 116: ...2 DressPack and SpotPack 2 9 1 Options 114 Rev E 3HAC 025861 001...
Страница 132: ...3 Specification of Variants and Options 3 1 14 Documentation 130 Rev E 3HAC 025861 001...
Страница 134: ...4 Accessories 132 Rev E 3HAC 025861 001...
Страница 137: ......




































































