





























1 Description
1.4.3 Robot references
24
Rev.E
3HAC 025861-001
1.4.3 Robot references
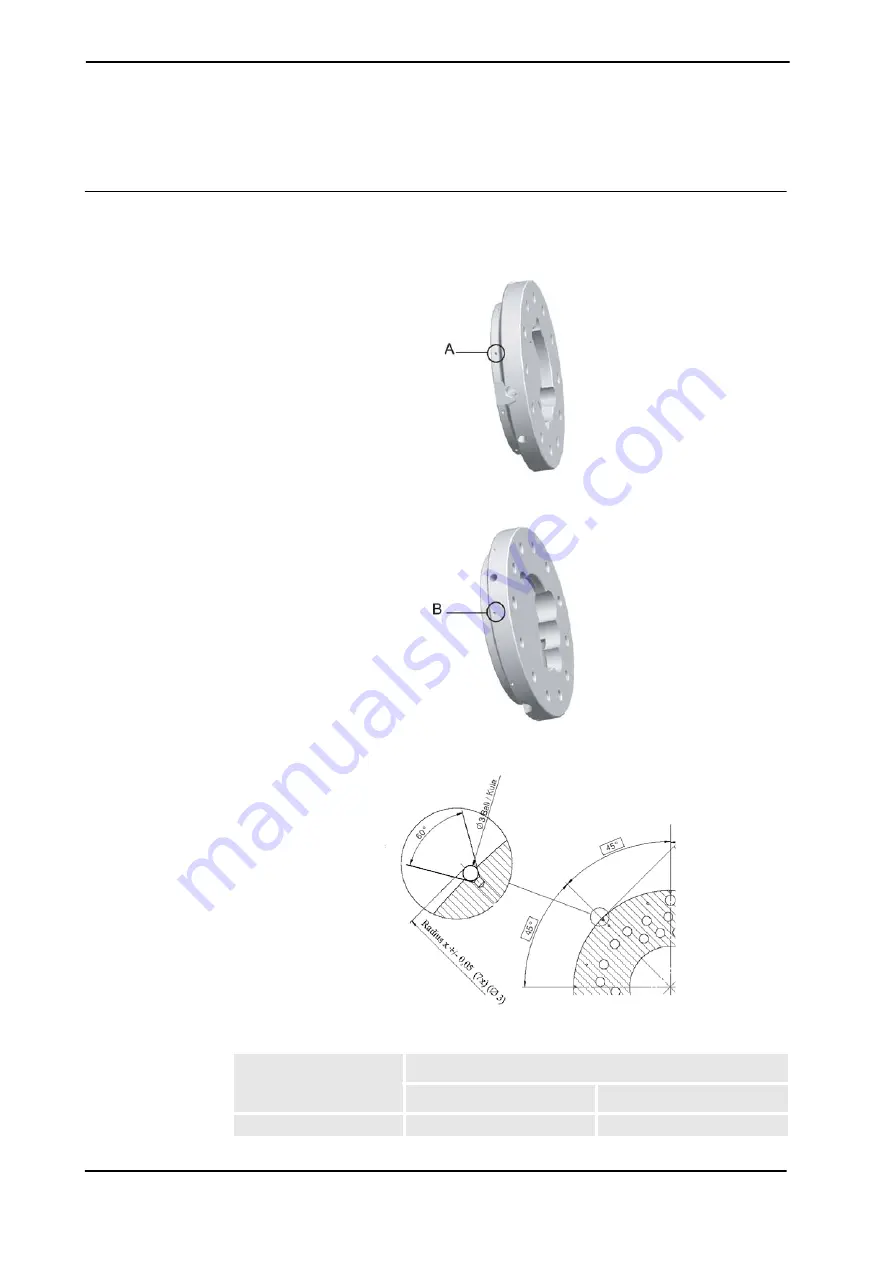
General
The holes shown in Figure 11 to Figure 13 are used for measuring the robot position
when integrated in a production cell.
Figure 11 Seven holes A, on a radius of x mm from axis 6 center on the standard tool flange.
Figure 12 Seven holes B, on a radius of x mm from axis 6 center on the insulated tool flange.
Figure 13 Detailed view of Tool Flange.
Robot
Radius X (mm) for references on tool flange
Standard
Insulated
IRB 6620 - 150/2.2
R=81,5
R=101,5
Содержание IRB 6620
Страница 1: ...Product specification Articulated robot IRB 6620 150 2 2 M2004...
Страница 2: ......
Страница 3: ...Product specification Articulated robot 3HAC025861 001 Rev E IRB 6620 150 2 2 M2004...
Страница 34: ...1 Description 1 6 1 General 32 Rev E 3HAC 025861 001 Figure 20 Holes for mounting of extra equipment...
Страница 116: ...2 DressPack and SpotPack 2 9 1 Options 114 Rev E 3HAC 025861 001...
Страница 132: ...3 Specification of Variants and Options 3 1 14 Documentation 130 Rev E 3HAC 025861 001...
Страница 134: ...4 Accessories 132 Rev E 3HAC 025861 001...
Страница 137: ......







































































